Moteurs
Deux moteurs sont inclus dans le kit PRisme, ainsi que deux roues. Voir également Servomoteurs.
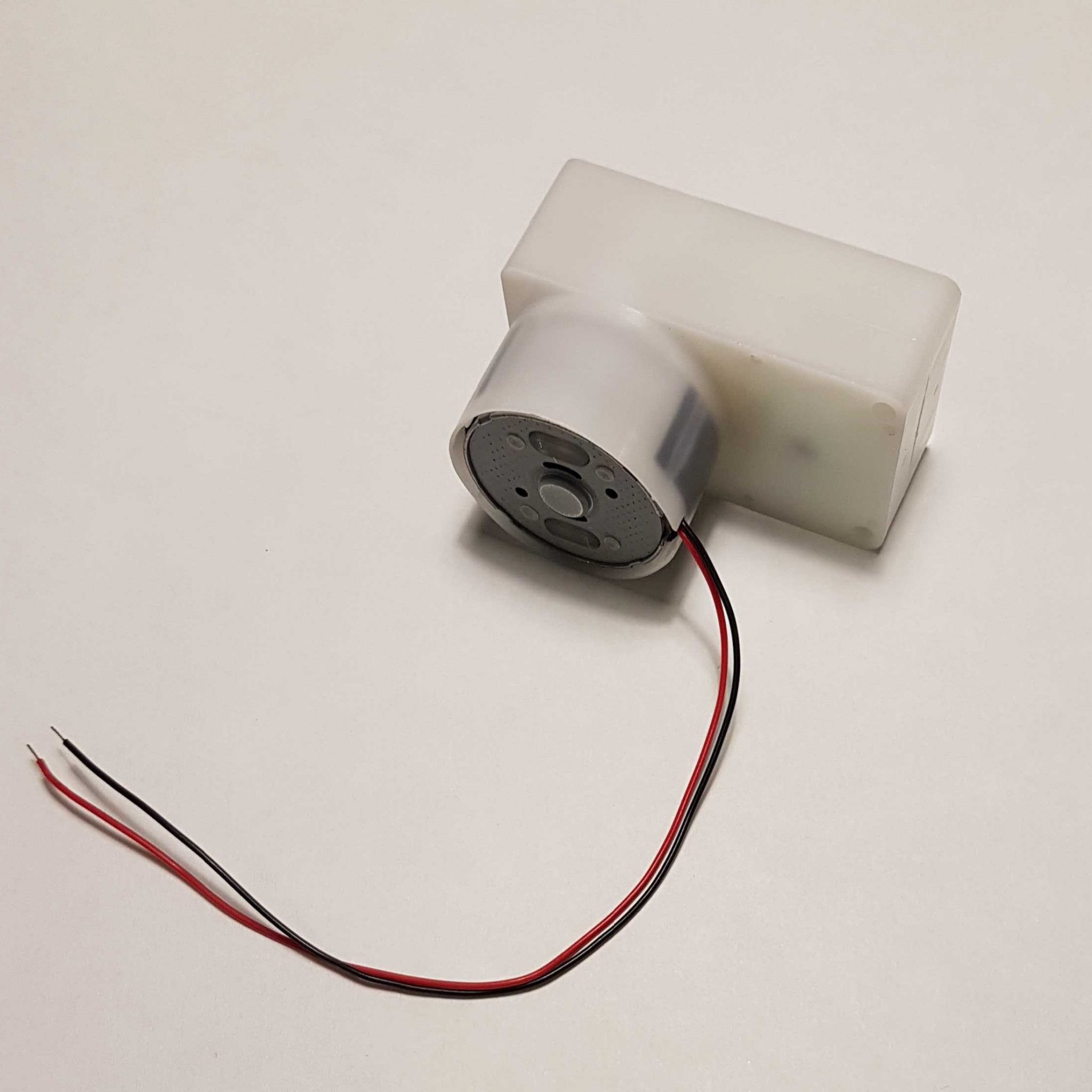 |
Étape 1
- Vérifier que les fils des moteurs soient déjà dénudés, torsadés et étamés.
|
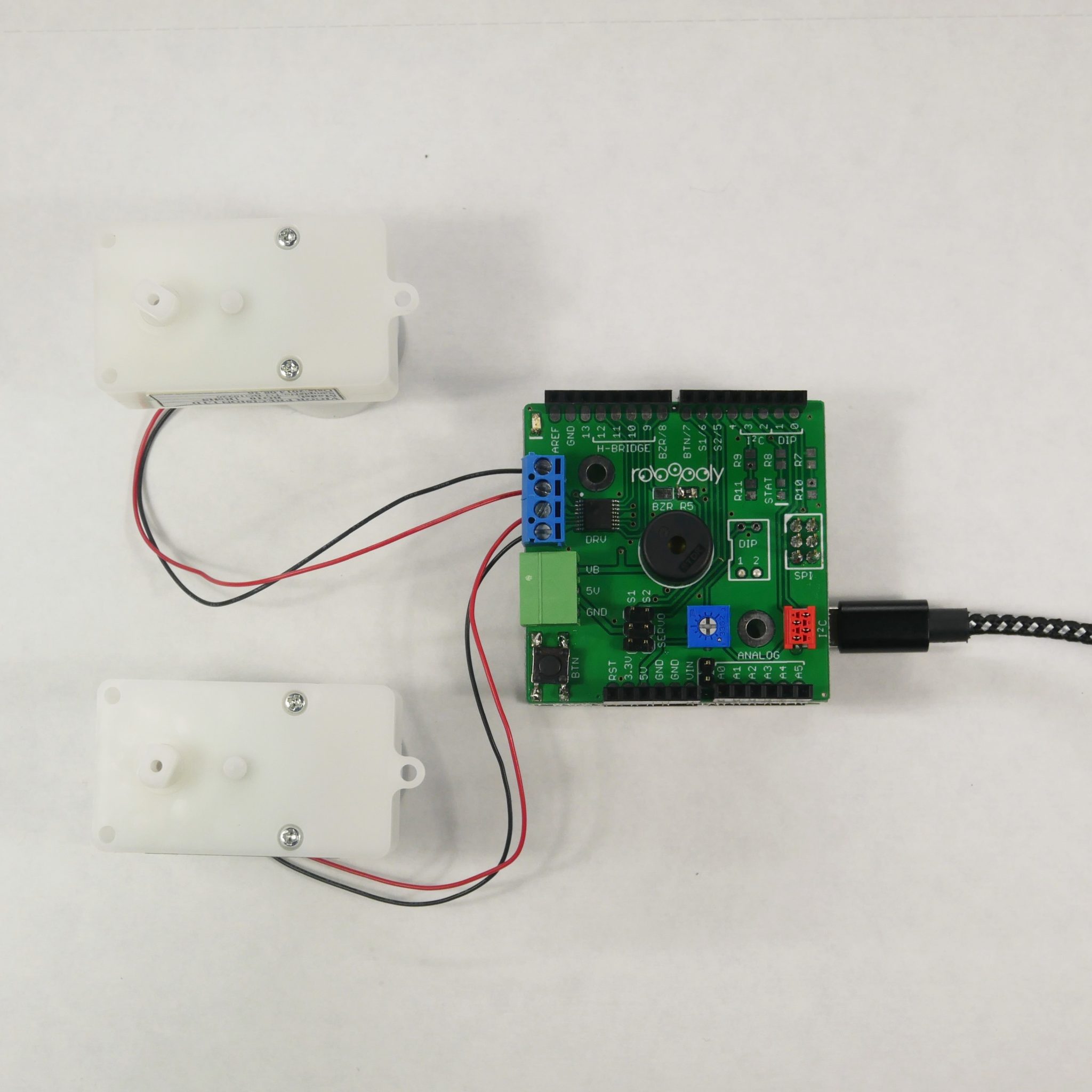 |
Étape 2
- Visser les fils des moteurs sur les borniers bleus du pont-H.
- Connecter le PRismino à l’aide d’un câble micro USB.
- Upload l’exemple Motors de la librairie Robopoly PRismino. Les moteurs devraient tourner. Si ce n’est pas le cas, vérifier les soudures.
- Selon le design du robot, si un moteur tourne dans le sens inverse de ce qui est souhaité, il suffit de permuter les fils.
|
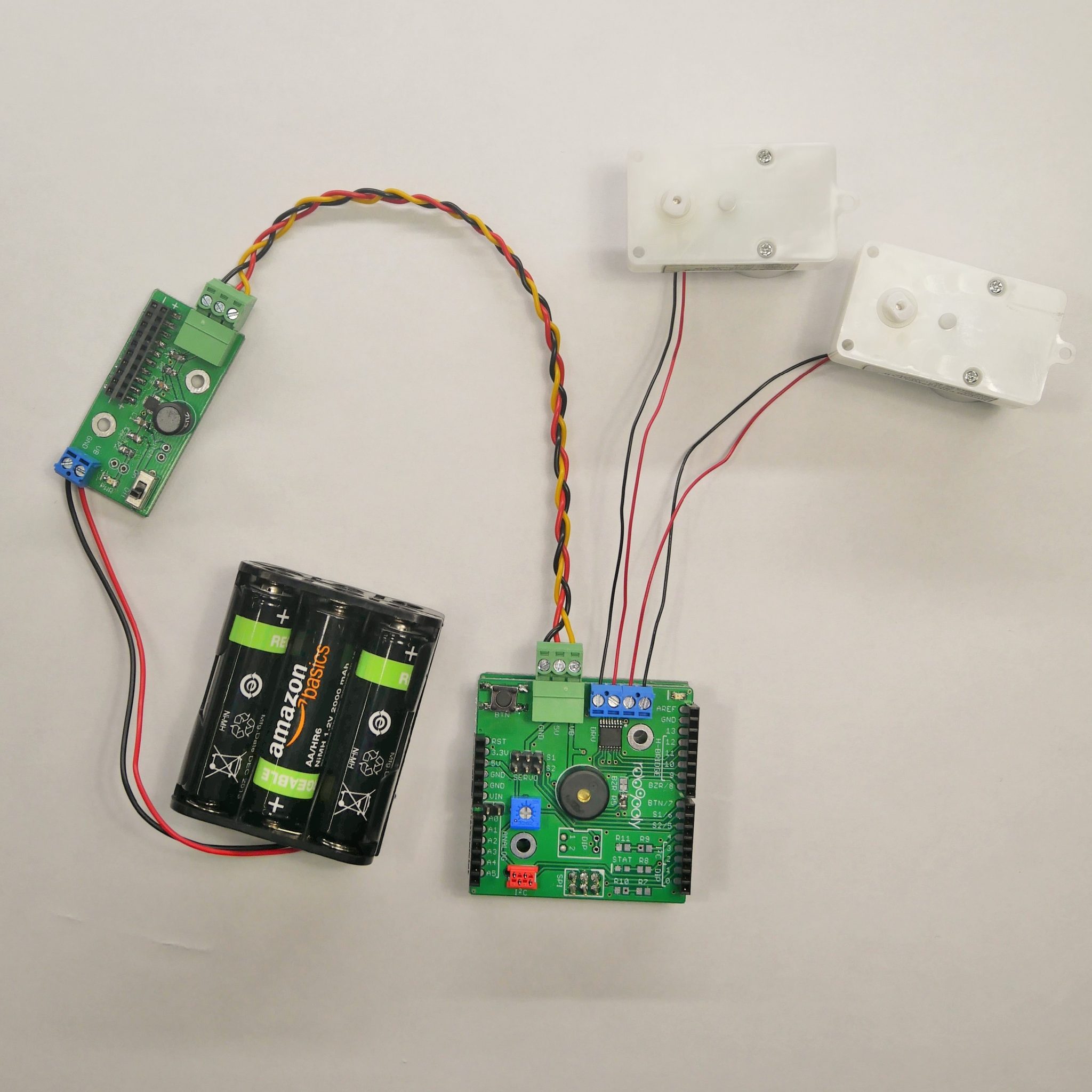 |
Étape 3
- Connecter la power board au shield à l’aide des câbles d’alimentation.
- Mettre l’interrupteur de la power board sur la position On. Les moteurs devraient tourner.
|
Page suivante : Capteurs infrarouges