Ce projet vise à construire un prototype de véhicule capable de scanner des villes. Il sera utilisé pour créer un modèle urbain 4D de la ville de Sion.
Ce projet va développer un véhicule, le ScanVan, capable de numériser des villes. En déployant plusieurs de ces véhicules dans les rues, des modélisations haute qualité pourraient être produites en temps réel.
Le ScanVan est équipé d’une caméra sphérique (4π) capable de transformer les environnements alentours en nuages de points au fil de la conduite. Ce véhicule possède son propre système de calcul à bord: un pôle dédié s’appuyant sur des circuits intégrés prédiffusés programmables (FPGA – field‐programmable gate arrays) et d’autres ressources informatiques spécialement conçues et optimisées pour le calcul photogrammétrique. Ainsi, le véhicule est capable de traiter un flux complet, commençant par l’acquisition d’images et se terminant par le calcul de modèles à point 3D.
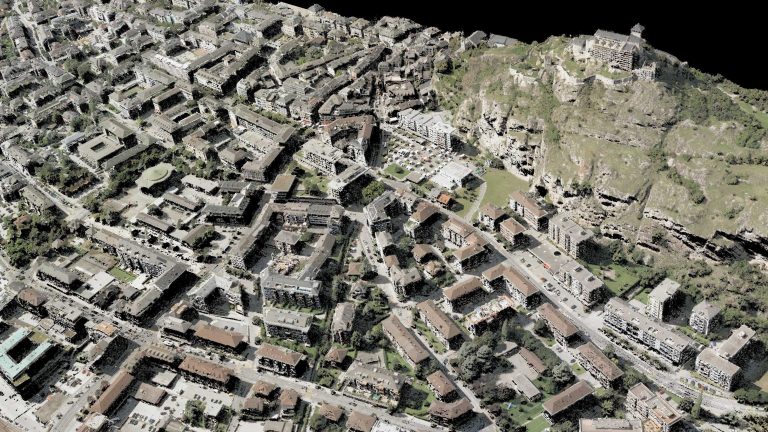
En guise de test, le projet a l’ambition de produire un modèle urbain 4D (incluant le temps) de la ville de Sion (Valais, Suisse), en utilisant le prototype ScanVan. L’ensemble des données sera accessible au public afin d’explorer de nouveaux services potentiels qui pourraient en bénéficier.
Ce projet de trois ans est une collaboration entre le Laboratoire d’humanités digitales (DHLAB) de l’EPFL, dirigé par le professeur Frédéric Kaplan, et la HES-SO Valais. Il est réalisé avec le soutien du Mobility Lab Sion Valais et financé par le Fonds national suisse de la recherche scientifique (PNR 75 “Big Data”).
| Investigateur principal | Prof. Frédéric Kaplan |
|---|---|
| Sponsor | Swiss National Science Foundation |
| Période | 2017-2020 |
| Laboratoire | DHLAB |
| Collaborations externes | HES-SO Valais, Mobility Lab Sion Valais |
| Collaboration | TRACE |