This project aims at building a prototype of a vehicle capable of scanning cities. It will be used to create a fully 4D urban model of the city of Sion.
This project will develop a vehicle, the ScanVan, capable of scanning cities. By deploying several of those vehicles in the streets, high‐quality models could be produced in real time.
The ScanVan is equipped with a spherical camera (4π) capable of turning surrounding environments into point clouds while driving. This vehicle possesses its own computation system aboard: a dedicated cluster relying on field‐programmable gate arrays (FPGAs) and other computational resources especially conceived and optimized for photogrammetric computation. Thus, the vehicle is able to deal with a complete workflow starting with the acquisition of images and ending with the calculation of 3D point models.
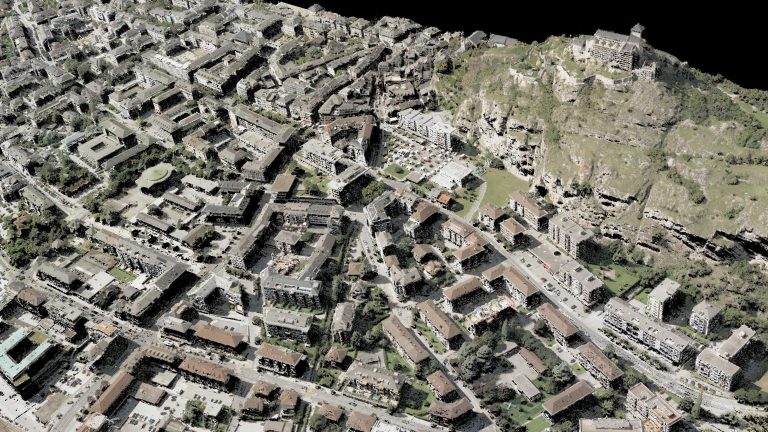
As a test case, the project ambitions to produce a 4D urban model (including time) of the city of Sion (Valais, Switzerland), using the ScanVan prototype. The dataset will be publicly available in order to explore potential new services that could benefit from it.
This three-year project is a collaboration between the EPFL Digital Humanities Laboratory (DHLAB), led by professor Frédéric Kaplan and HES-SO Valais. It is done with the support of the Mobility Lab Sion Valais and funded by the Swiss National Science Foundation (PNR 75 “Big Data”).
| Principal investigator | Prof. Frédéric Kaplan |
|---|---|
| Sponsor | Swiss National Science Foundation |
| Period | 2017-2020 |
| Laboratory | DHLAB |
| External collaborations | HES-SO Valais, Mobility Lab Sion Valais |
| Collaboration | TRACE |