Humanoid Robotics at Biorob
Our research on Humanoids Robotics is related to locomotion control, whole-body control, and collaboration between robots and humans.
Current Projects
 |
 |
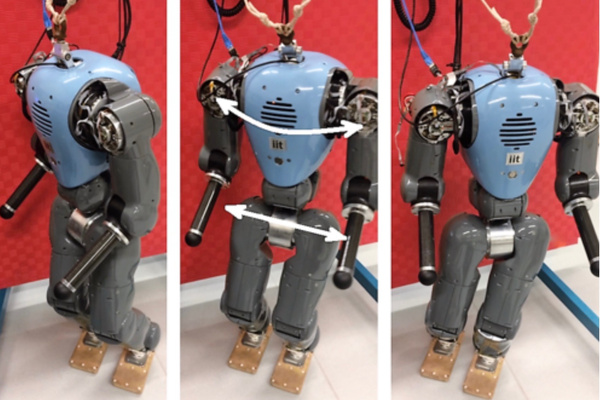
| Multi-Modal Locomotion (Walkman Project) (Salman Faraji) |
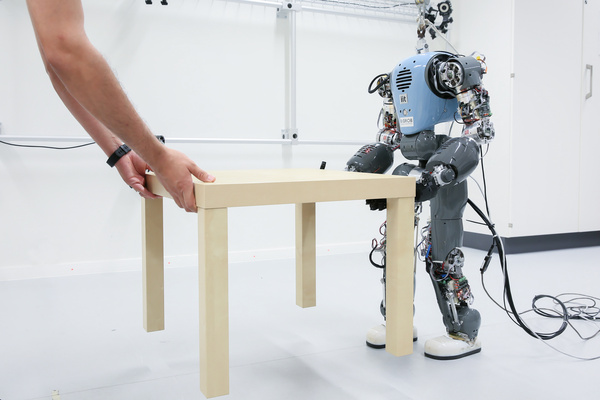
Cognitive Interaction in Motion (Cogimon project) (Jessica Lanini, Hamed Razavi) |
Past Projects
 |
 |
 |
 |
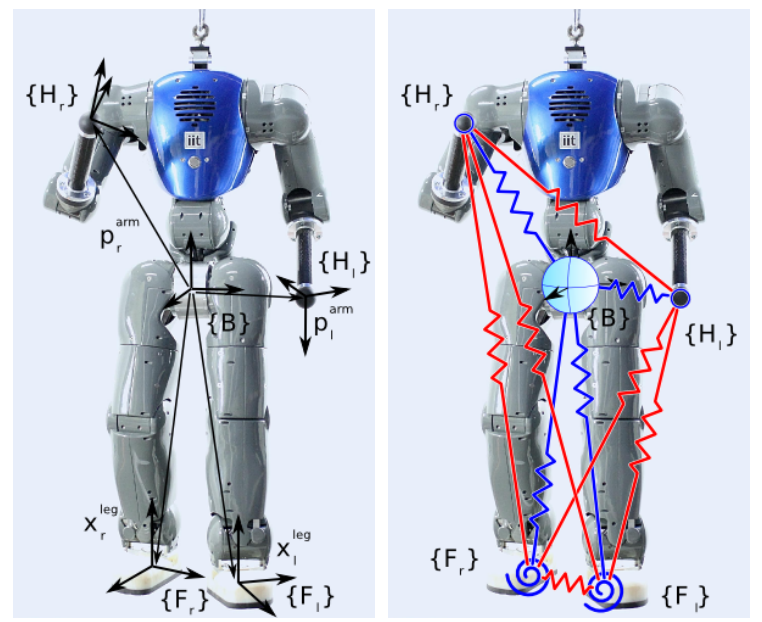
| Control architecture for discrete and rhythmic movements | Dynamical Movement Primitives | Kinematics based balance control | Neuro-Muscular controller for Coman |