Description
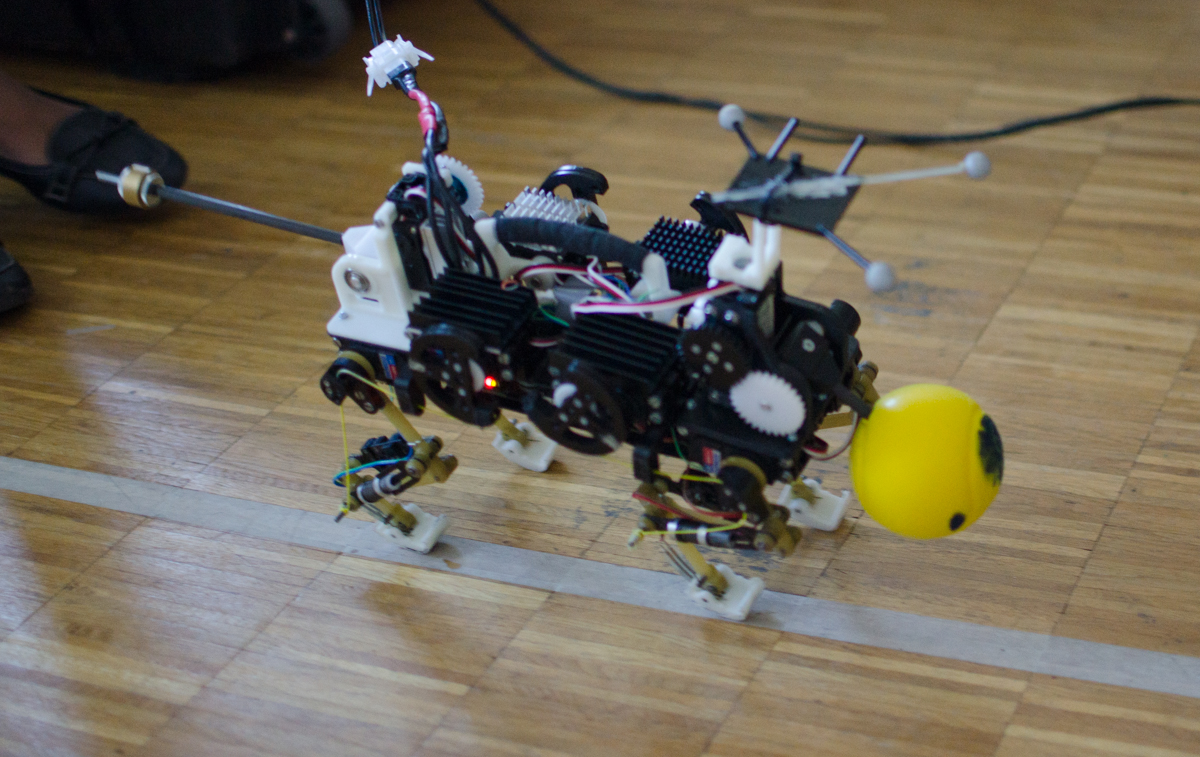
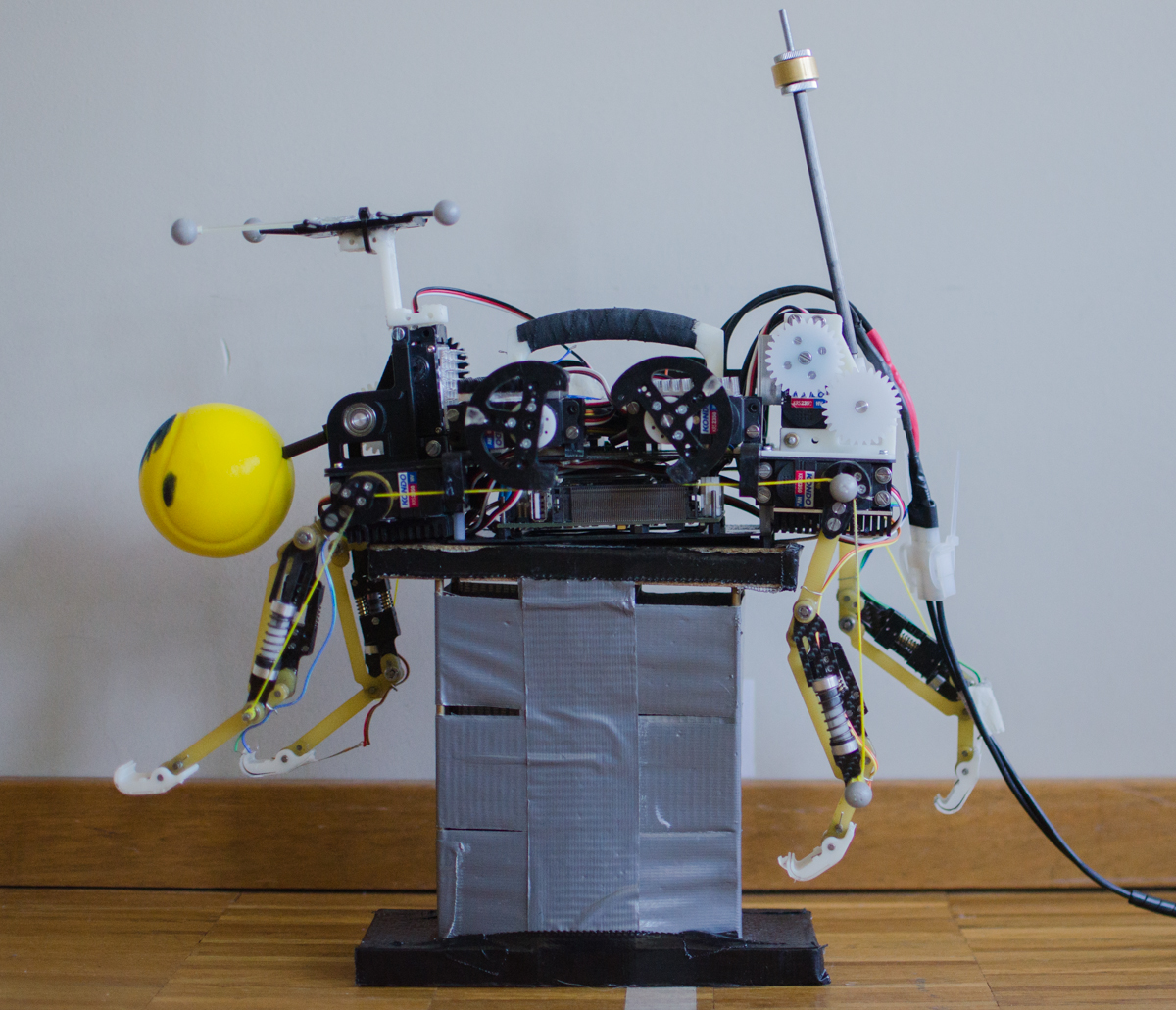
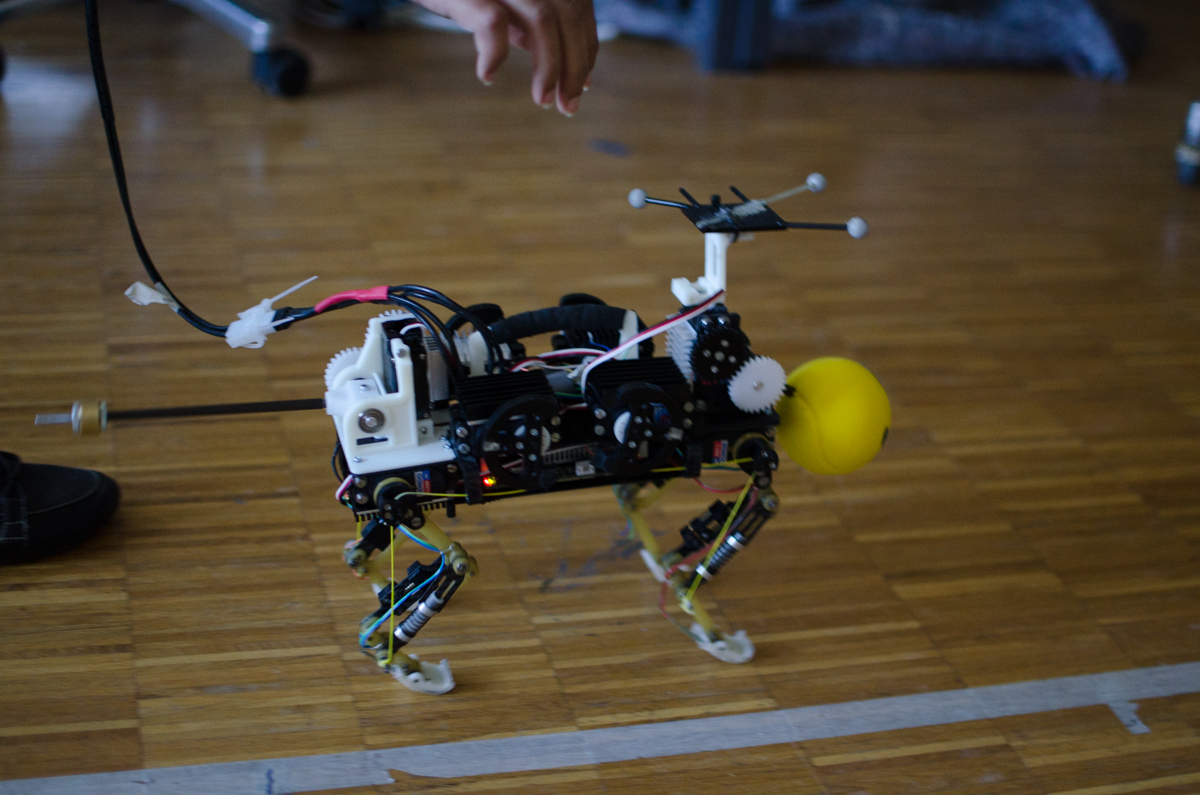
This work explores the possible roles of active tails for steady-state legged-locomotion. A series of simple models are proposed which capture the dynamics of an idealized running system with an active tail. The models suggest that the control objectives of injecting energy into the system and stabilizing body-pitch can be effectively decoupled via proper tail design: a long, light tail. Thus the overall control problem can be simplified, using the tail exclusively to stabilize body-pitch: this effectively relaxes the constraints on the leg-actuators, allowing them to be recruited specifically for adding energy into the system. We show in simulation that models with long-light tails are better able to reject perturbations to body-pitch than short-heavy tails with the same moment of inertia. Further, we present the results of a one degree-of-freedom tail mounted on the open-loop controlled quadruped robot Cheetah-Cub-T. Our results show that an active tail can greatly improve both forward velocity and reduce body-pitch per stride, while adding minimal complexity. Further, the results validate the long-light tail design: shorter, heavier tails are much more sensitive to configuration and control parameter changes than longer and lighter tails with the same moment of inertia.
Pictures
 |
 |
 |
|
Related Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.