As part of the Human Brain Project (HBP), we are developing neuromechanical simulations of rodents in the framework of a collaboration between three labs at EPFL: BioRob headed by Prof. Auke Ijspeert, G-Lab headed by Prof. Grégoire Courtine, and the Translational Neural Engineering lab headed by Prof. Silvestro Micera.
The primary goal of the project is to uncover the role of spinal circuits involved in movement and control of limbs in rodents during locomotion and reaching tasks. While G-Lab and Micera-Lab use in-vivo techniques to study the spinal circuits, BioRob focuses on developing closed loop neuromechanical models of rodents to aid the experimental research studies. The simulation models are further used to
understand the effects of epidural electrical stimulation (EES) in recovery of locomotion and reaching tasks after partial spinal cord injuries.
The neuromechanical model of the rodent is supported and being developed in multiple platforms. The main platform is the NeuroRobotics Platform (NRP) being developed by the HBP. NRP is an integration of multiple frameworks such as Gazebo, ROS, NEST, Opensim. The different components of the closed loop simulation are shown in figure(1).
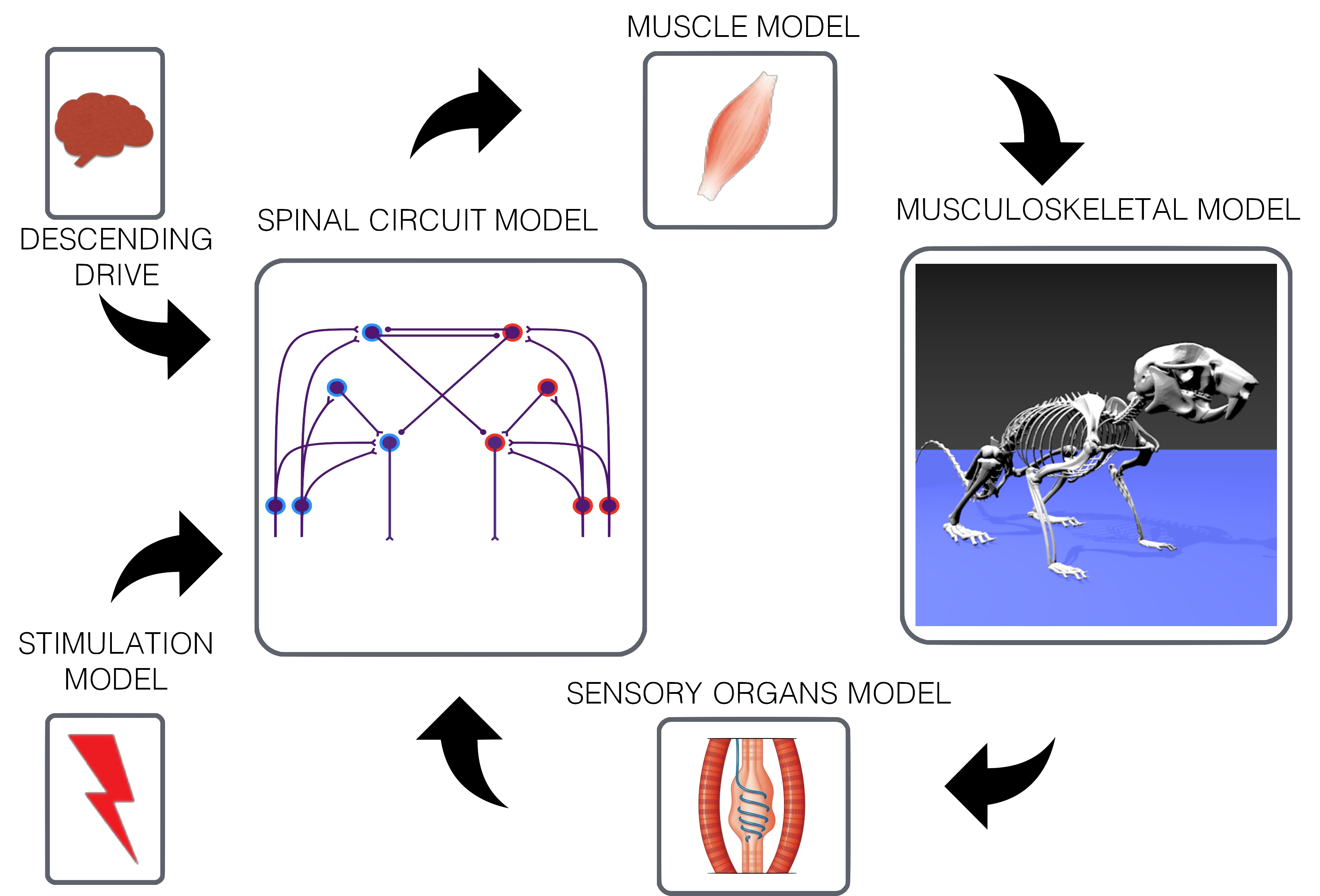
Figure 1 : Components of closed loop neuromechanical simulations for rodent locomotion and reaching tasks
Apart from the above collaborations under HBP, BioRob also has strong external collaborations with Laboratory of Theoretical & Computational Neuroscience headed by Prof. Ilya A. Rybak and with Prof. Marco Storace from COMPsys group. With these groups we integrate the biomechanical model of rodents with their state-of-the-art spinal circuit models of locomotion for closed-loop sensorimotor studies.