
We develop the pre-built Nexus omni-directional drive platform to render furniture mobile according to patients’ needs, which is easy to replicate and configure for future extensions in assistive environment.
Mechanical Configuration
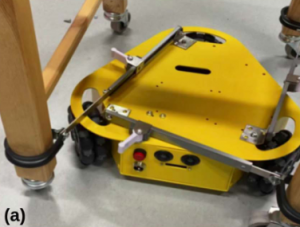
We adopt a Tripous attachment configuration that connects the Omnibot to furniture in a secure and interchangeable way. Tripous reaches out its arms to grab legs of the furniture and drive them as the main body of robot moves. Three arm connections ensure that the furniture is fully constrained and will not slip when driven by the robot.
Electronics Extension
Omnibot is equipped with Arduino Mega extended by a custom Printed Circuit Board. To enable teleoperation with higher level language in ROS structure, the basic functionality of sensors and actuators has been implemented on-board. 48 ARGB-LEDs pasted at the bottom of Omnibot indicate the status and direction of motion.

Interactive User Interfaces
People with limited mobility may suffer from other issues, such as above-elbow amputee or extremities paralysis by the spine cord injury, which impacts on their interaction abilities as well. Omnibot is equipped with four types of interactive control to help people with different needs, including:
- Automatic Control: Program interface is designed for carer of people for configuration purposes
- Voice Control: It relies on an speech-to-text engine based on recurrent neural network which ingests speech spectrograms and generates text transcriptions
- Gesture Control: Translates the detected Hand Landmark Model into robot commands
- Tablet Control: Omnibot can be controlled with a tablet application on Android in the interactive mode

