Endovascular Robotics
Teleoperated robotic system for mechanical thrombectomy
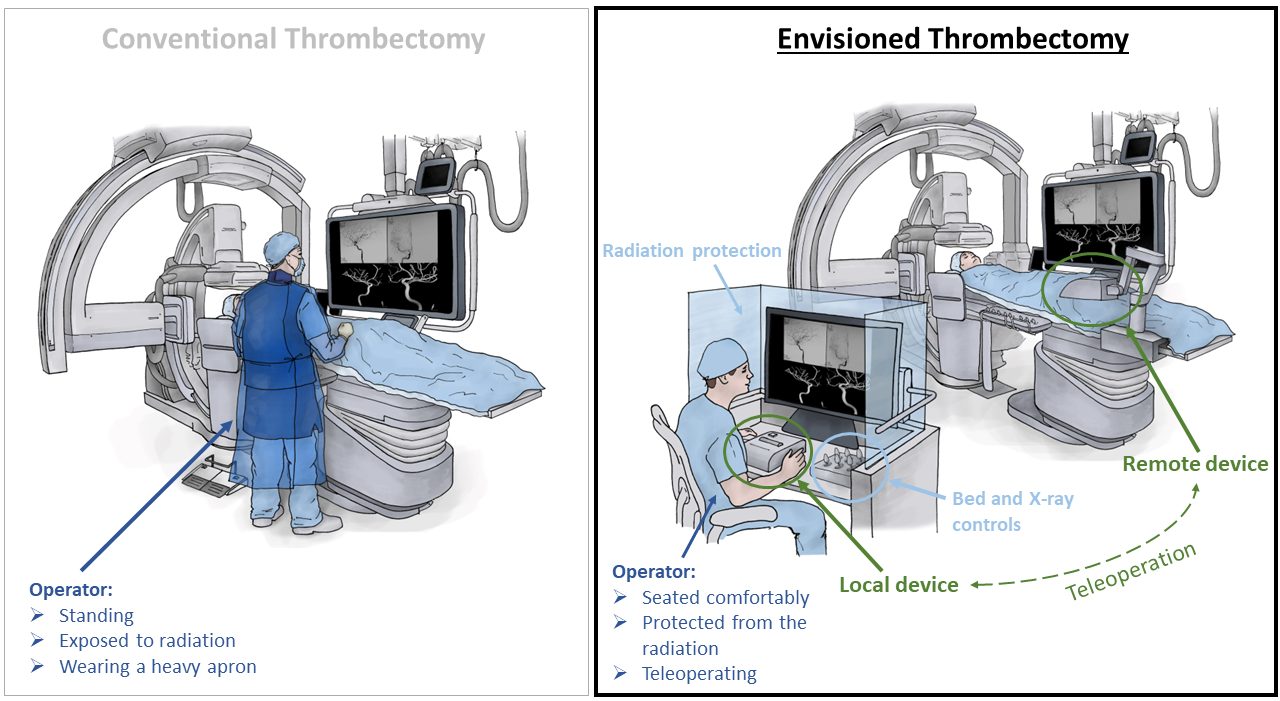
Mechanical thrombectomy is a minimally invasive endovascular procedure for the treatment of acute ischemic stroke in which a blood clot blocks an artery in the brain. The procedure consists of the mechanical extraction of the clot through aspiration or stent retrieval. In the conventional setup, the procedure is performed under fluoroscopic X-ray imaging which is harmful to the medical staff. In this project, we develop a teleoperated robotic system that will not only protect the operator from radiation but also improve the efficacy of the treatment by assisting in choosing the appropriate extraction technique.
The project is in collaboration with the research team of Dr. Paolo Machi who is the head of the Department of interventional neuroradiology at Hopitaux Universitaires de Genève (HUG).
Four-Handed Human Robot Manipulation for Laparoscopic Surgery
This project tackles the design of a 4-arms system with application to laparoscopic surgery. Currently, this task is performed by at least two people: the surgeon and one assistant who is manipulating the endoscope and the retractor. The envisioned 4-arms system would enable the surgeon to control all four instruments. This may increase synchrony in the movements and avoid ambiguity arising from miscommunication.
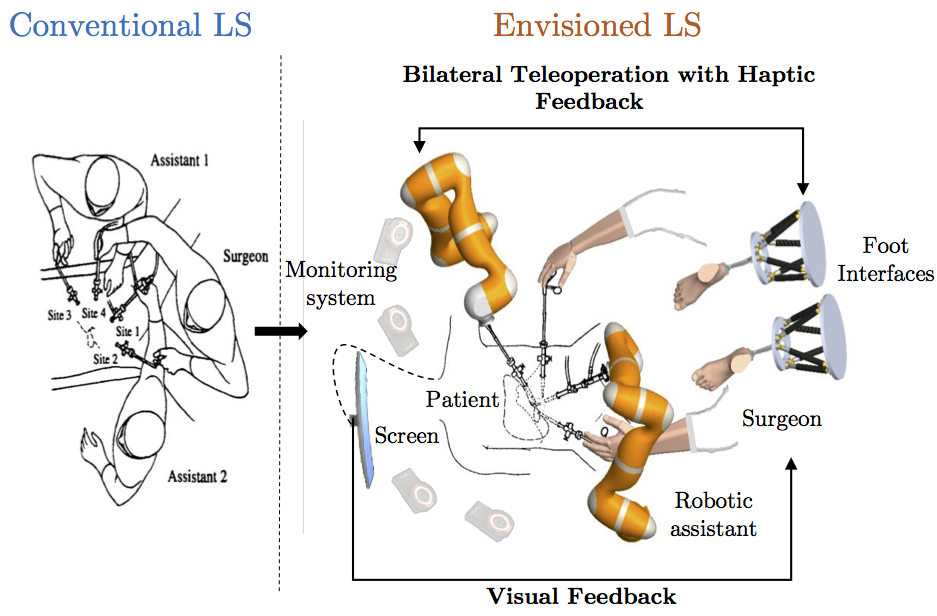
This project involves a collaboration with the Swiss Foundation for Innovation and Training in Surgery (SFITS) at the Hopitaux Universitaires de Genève (HUG).
More details are here.