Description
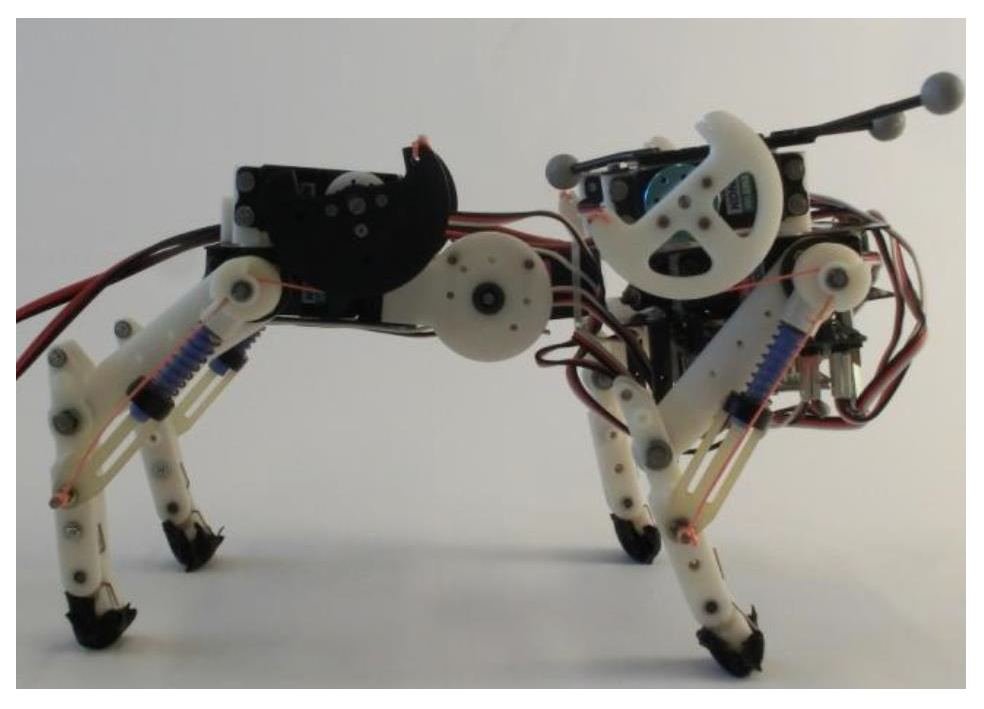
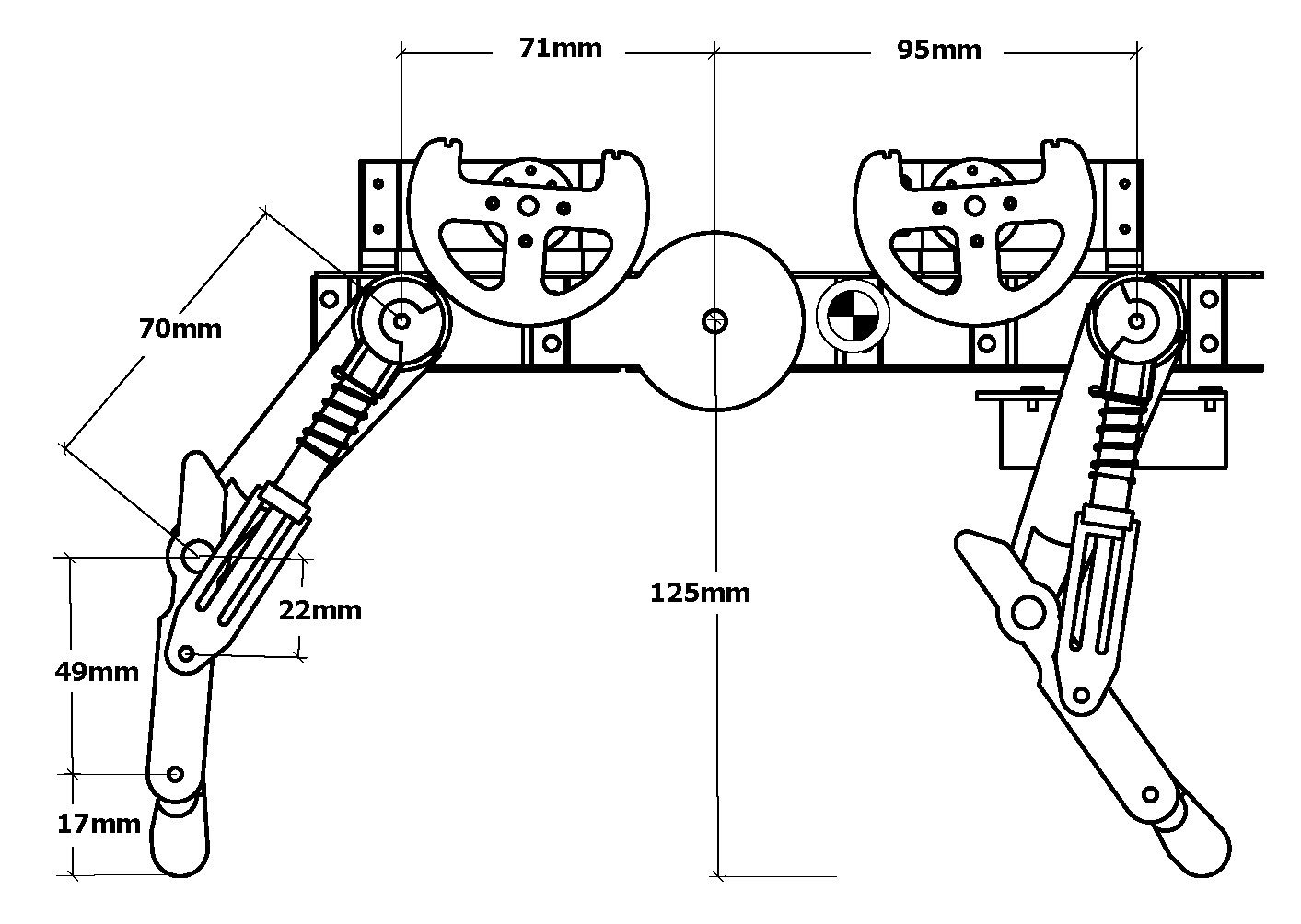
The complaint, quadrupedal robot Bobcat is a cheap and easy to produce experimental platformfor dynamic locomotion. With the actuation design based on the Cheetah-Cub, it was developed in BIOROB extending morphology research with an active and compliant spine. The leg design features a 2-segmented compliant leg with an additional springy toe. The width between fore- and hind-shoulders is different to enable overlapping feet (often seen in the fast motion of animals). The spine actuation is achieved with a single RC servomotor, positioned in between fore and hind trunk-segment. Itsmovement range is 35deg in the saggital layer. A fully connected CPG-network resembling the one implemented on Cheetah-cub is used to control the robot. An additional oscillator node expands it for the spine actuation. Electronic hardware and power-supply are the same as in Cheetah-Cub.
Pictures
 |
 |
Related publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Robust Walking Using Peicewise Linear Spring
2014. Dynamic Walking 2014, ETH Zurich, Switzerland, June 10-13, 2014.Piecewise linear spine for speed-energy efficiency trade-off in quadruped robots
Robotics And Autonomous Systems. 2013. Vol. 61, num. 12, p. 1350-1359. DOI : 10.1016/j.robot.2013.08.001.Use Your Spine! Effect of Active Spine Movements on Horizontal Impulse and Cost of Transport in a Bounding, Quadruped Robot
2013. Dynamic Walking, Pittsburgh, USA, June, 2013.Benefits of an Active Spine Supported Bounding Locomotion With a Small Compliant Quadruped Robot
2013. 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, May 6 – 10, 2013. p. 3329-3334. DOI : 10.1109/ICRA.2013.6631041.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.