Robot Description
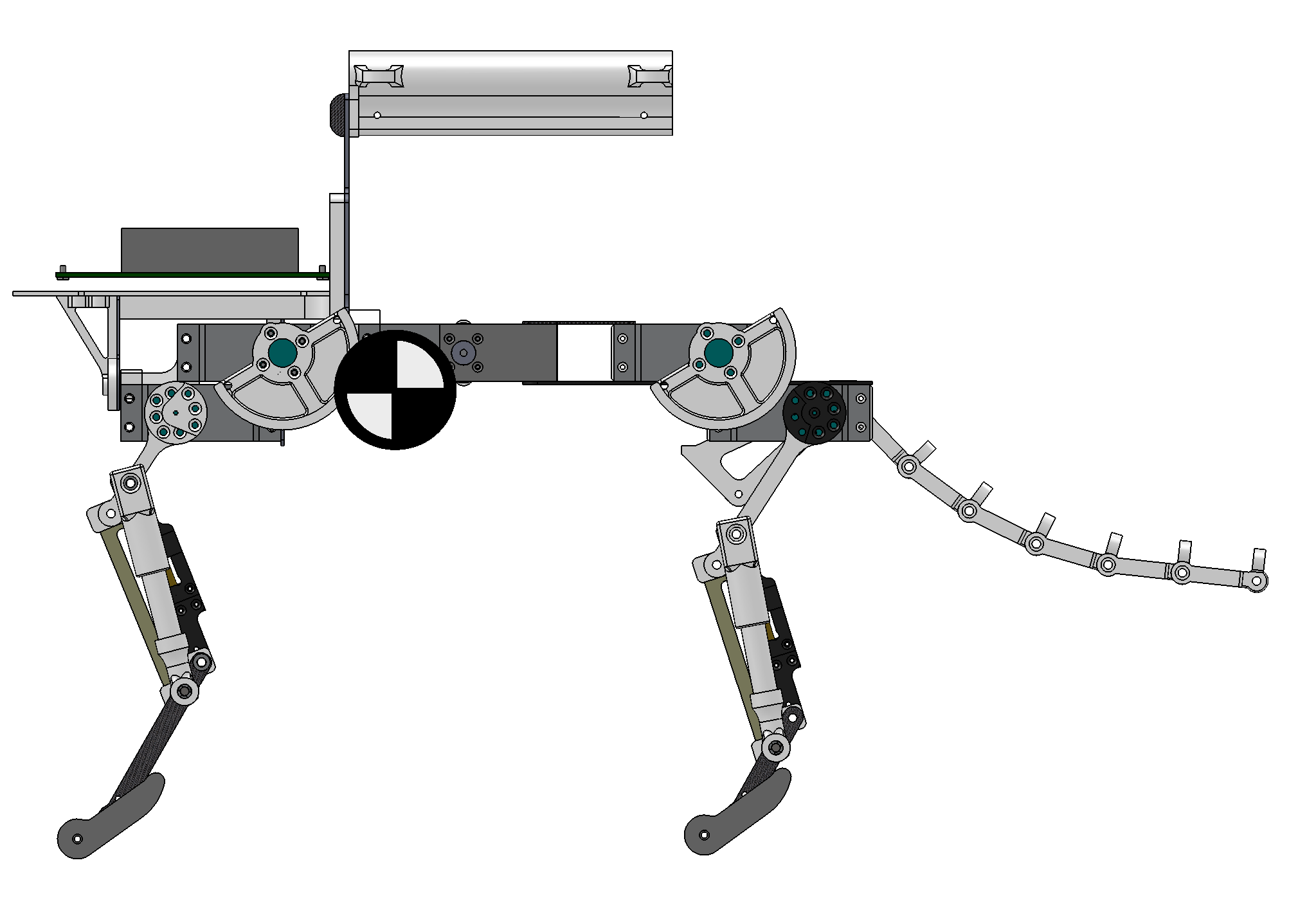
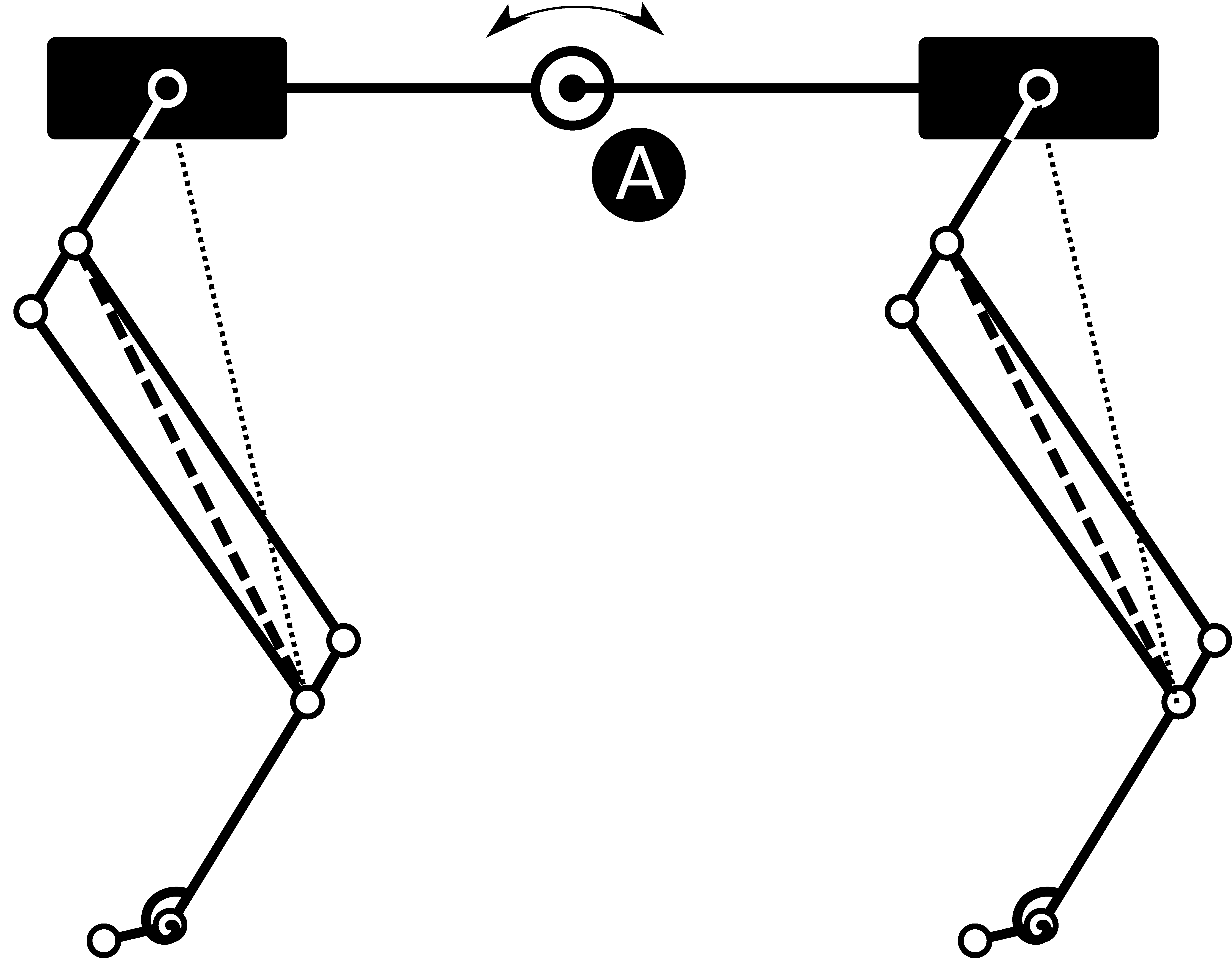
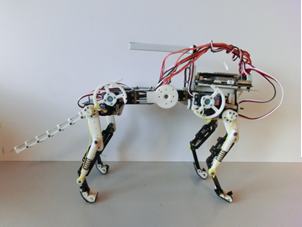
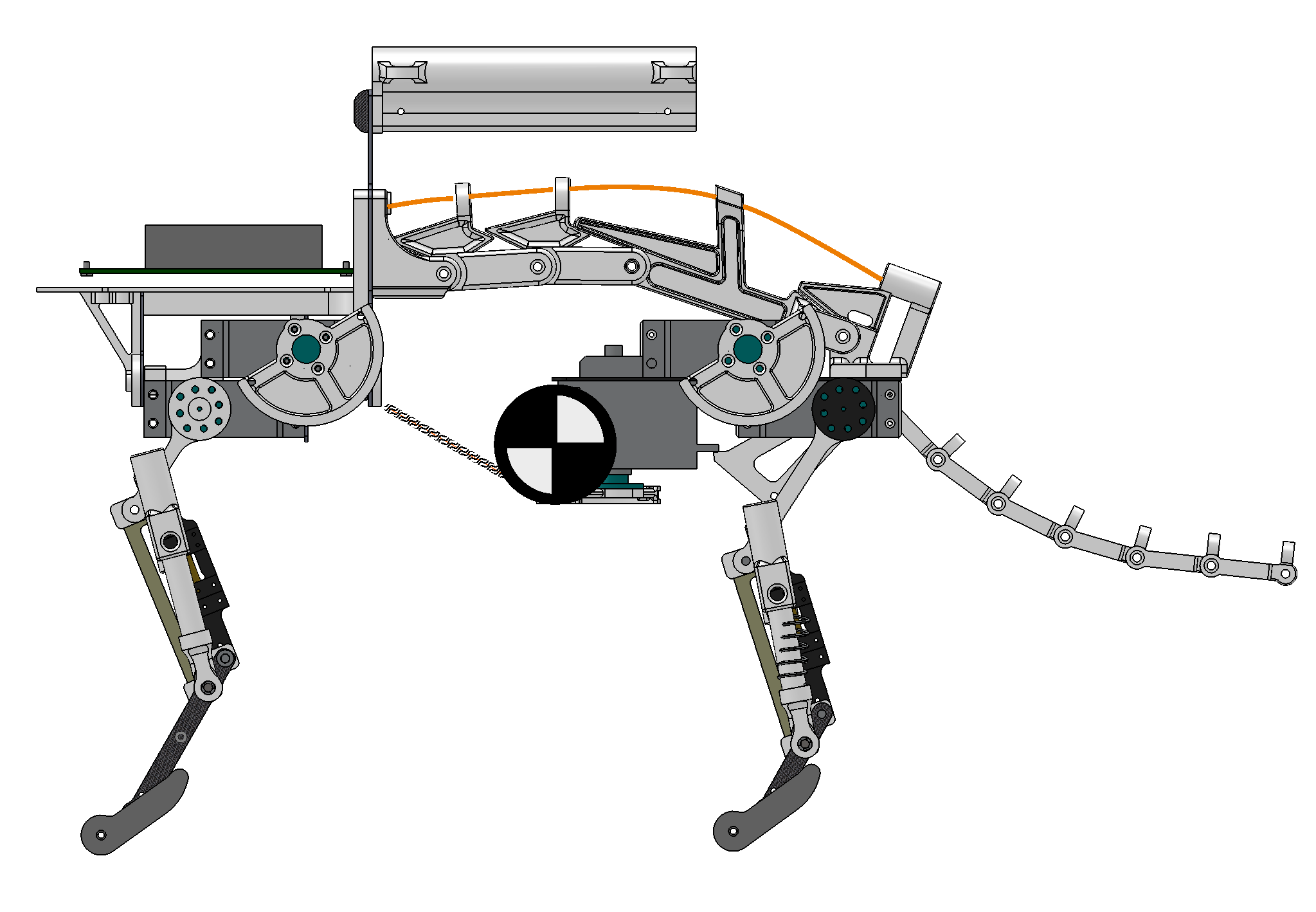
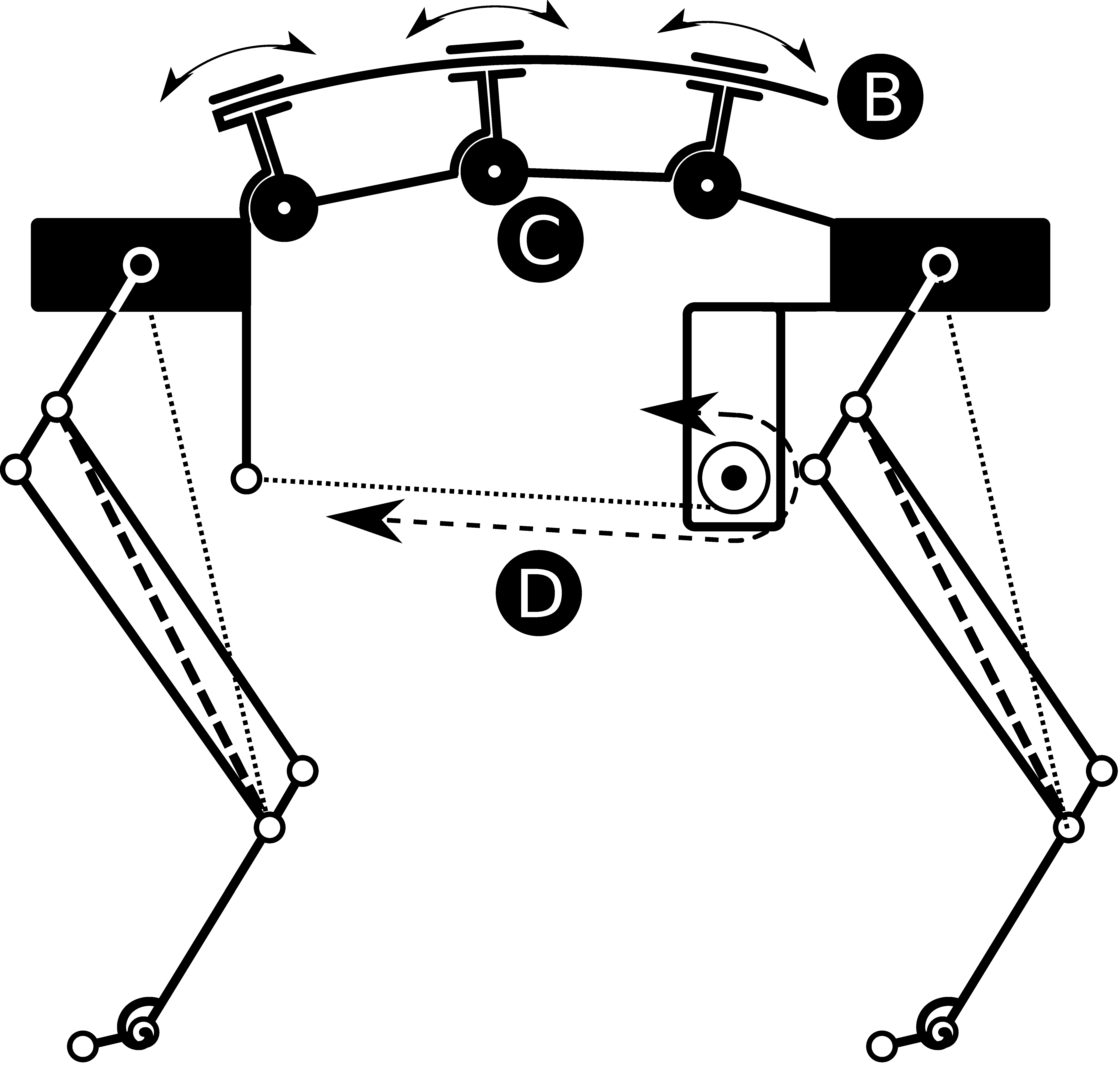
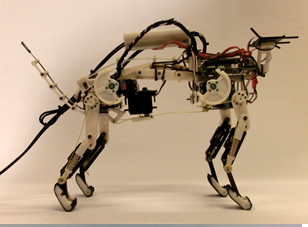
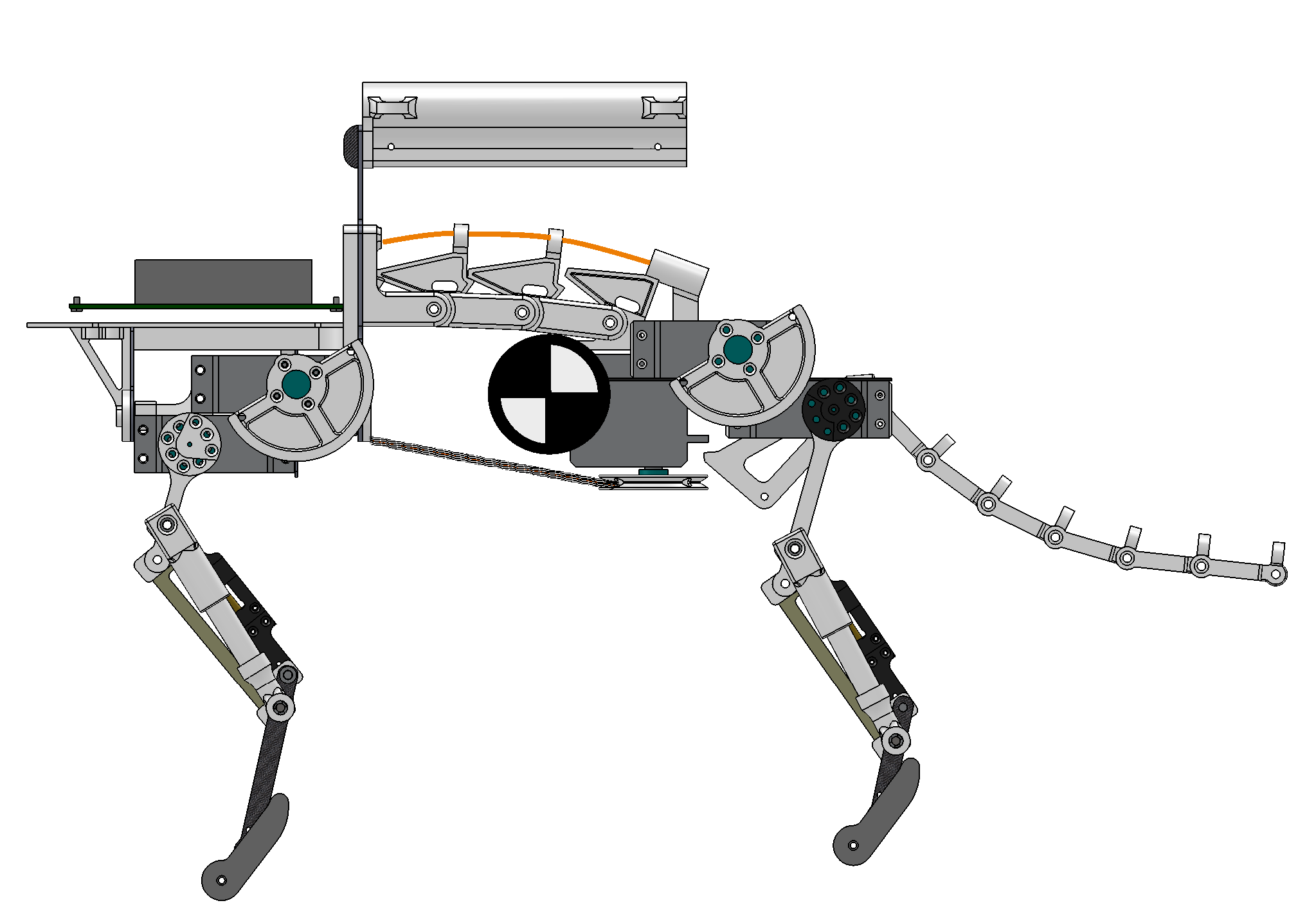
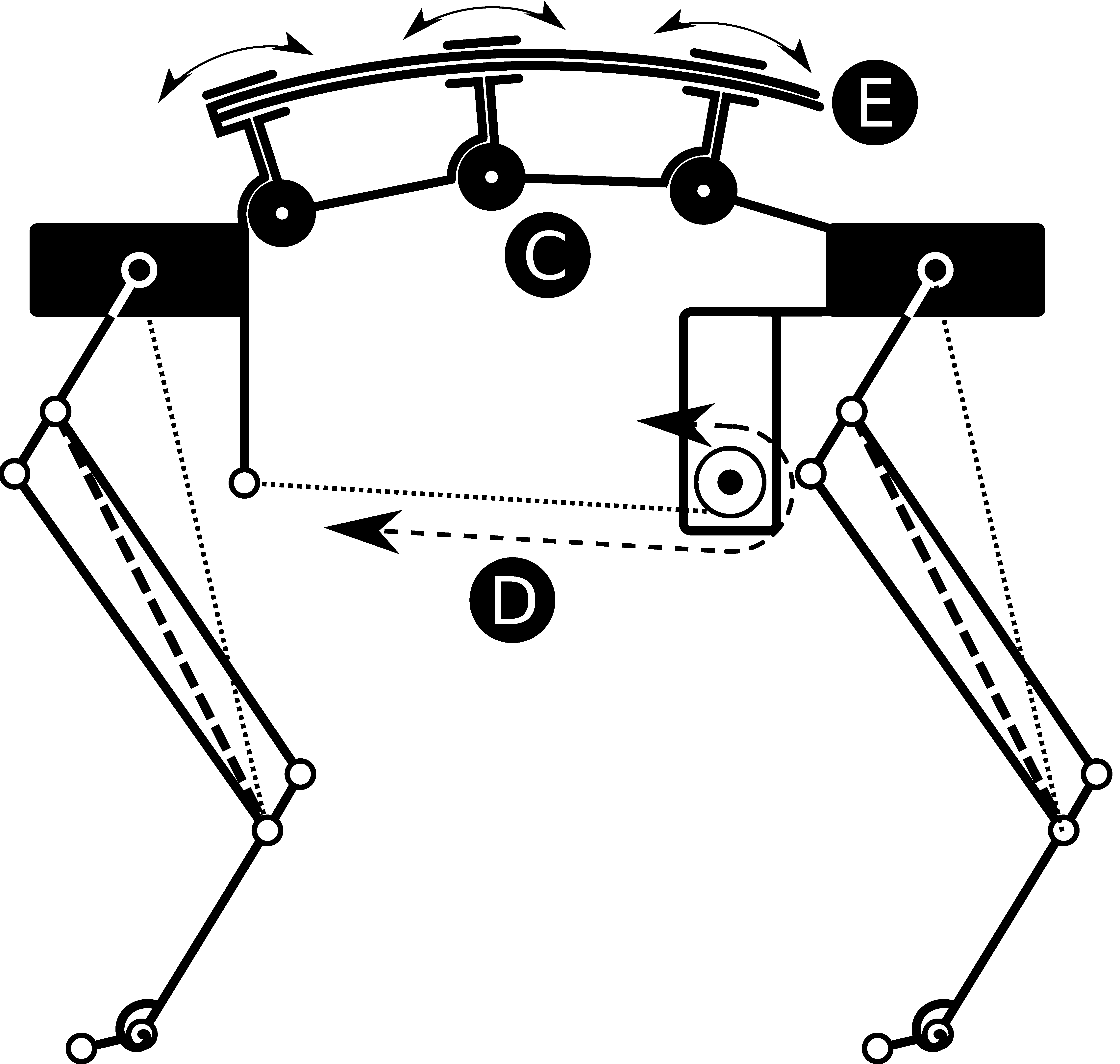
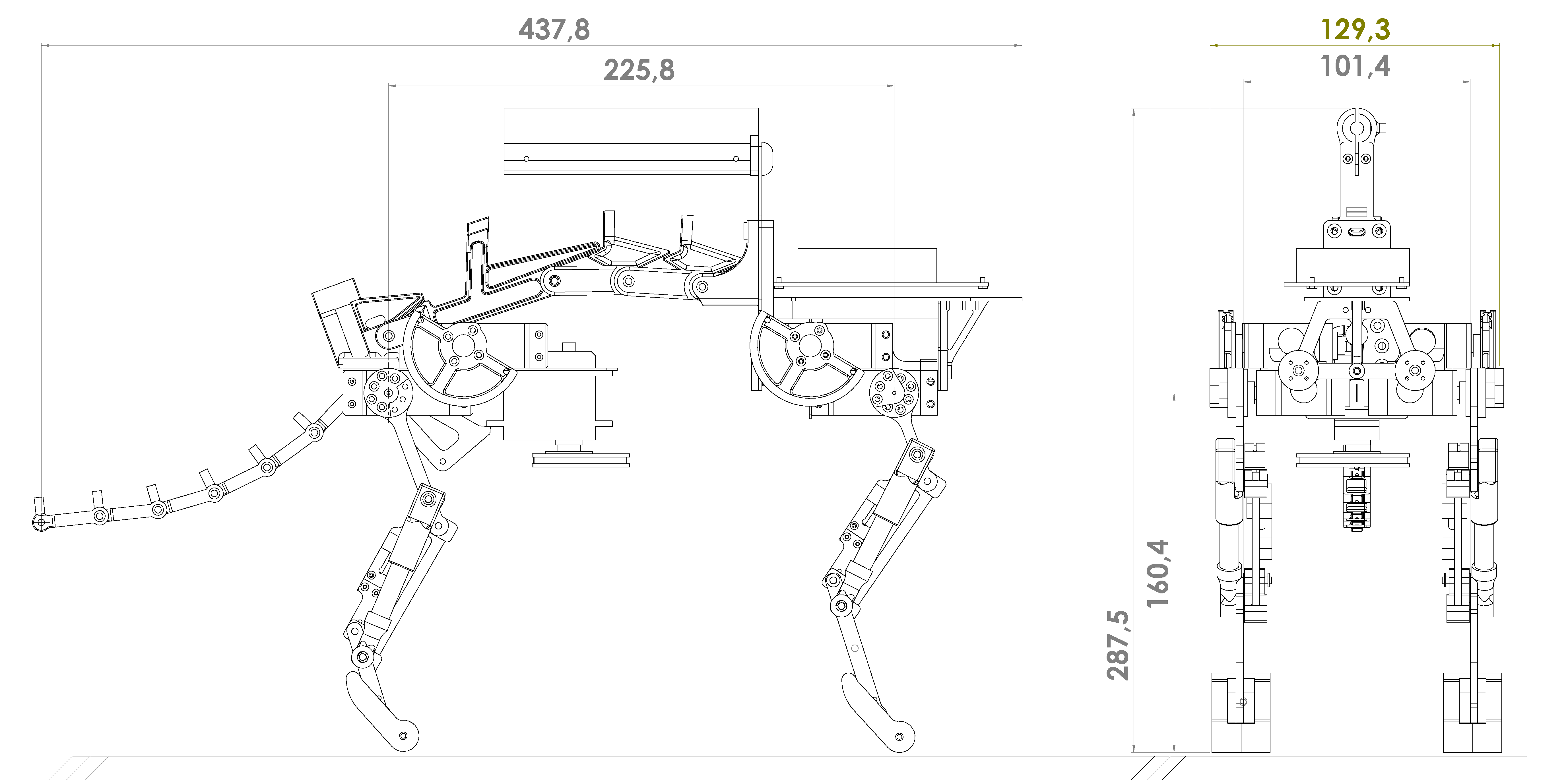
Lynx is a compliant quadruped robot with the focus on three modular spine designs and a pantograph leg design. It was mainly built out of milled carbon- and glass fiber plates as well as 3D-printed ABS-pieces. The actuation is realized with RC-Servomotors (Kondo KRS2350 ICS, stall torque 2 Nm at 6 V) that are controlled by an RB110-electronics board with integrated Linux-OS. The robot has 9 actuated degrees of freedom (DOF), two per leg and one in the spine. It consists of two trunk segments of that the front one is slightly heavier (about 40 g) caused by the location of the RB110, the legs and an active spine that connects the trunk elements. The spine-versions (SV) are all actively actuated but differ in their use of the compliant elements as well as a “single point of rotation” (the strongest abstraction from nature) vs. “multiple points of rotation” (a less strong abstraction from nature). The design is completed by a passive tail-like structure, that acts like a 5th-leg-stabilizer of the system in case of high pitching motion induced by bad gaits (it prevents the robot from falling backward). In these cases, the compliant elements in the structure will push the robot in the opposite pitch-direction. This results in the establishment of ground contact with all four legs. This tail-like structure represents a non-bio-inspired part, as animals (expect the Kangaroo and some small mammals) seem not to use their tails for active pitch support during ground locomotion (ongoing research).
Pictures
 |
 |
 |
 |
 |
 |
 |
 |
|
 |
||
Videos
Related Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.Comparing the effect of different spine and leg designs for a small bounding quadruped robot
2015. ICRA 2015, Seattle, Washington, USA, May 26-30, 2015. p. 3128-3133. DOI : 10.1109/ICRA.2015.7139629.Comparing the effect of different spine and leg designs for a small, bounding quadruped robot
Dynamic walking 2014, Zürich, June 10, 2014 – June 13, 2014.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.