When you access EPFL websites, we may set cookies on your devices and process personal data about you in accordance with our privacy policy. You can block cookies by using your browser settings.
Symbitron: Symbiotic man-machine interactions in wearable exoskeletons to enhance mobility for paraplegics
2013-10-01 to 2018-03-31 (ongoing project)
The goal of Symbitron is to enable individuals with paraplegia to regain mobility with a novel lower-limb exoskeleton and a bio-inspired controller. BioRob’s role is to develop and test a neuromuscular controller that can produce various walking gaits with resemblance to human kinematics, kinetics, and muscle activations with few sensors and no pre-defined reference patterns.
Neuromuscular Controller
For real world function, wearable devices to assist gait should be highly responsive to both the user and the environment. Users should also be able to interact with the device in an intuitive manner. This positive shared control between machine and human is especially important for individuals with spinal cord injuries, where active recruitment of their own neuromuscular system could promote motor recovery. Here we demonstrate the capability of a biologically-inspired neuromuscular controller (NMC) and its use in assisting the gait of SCI test pilots.
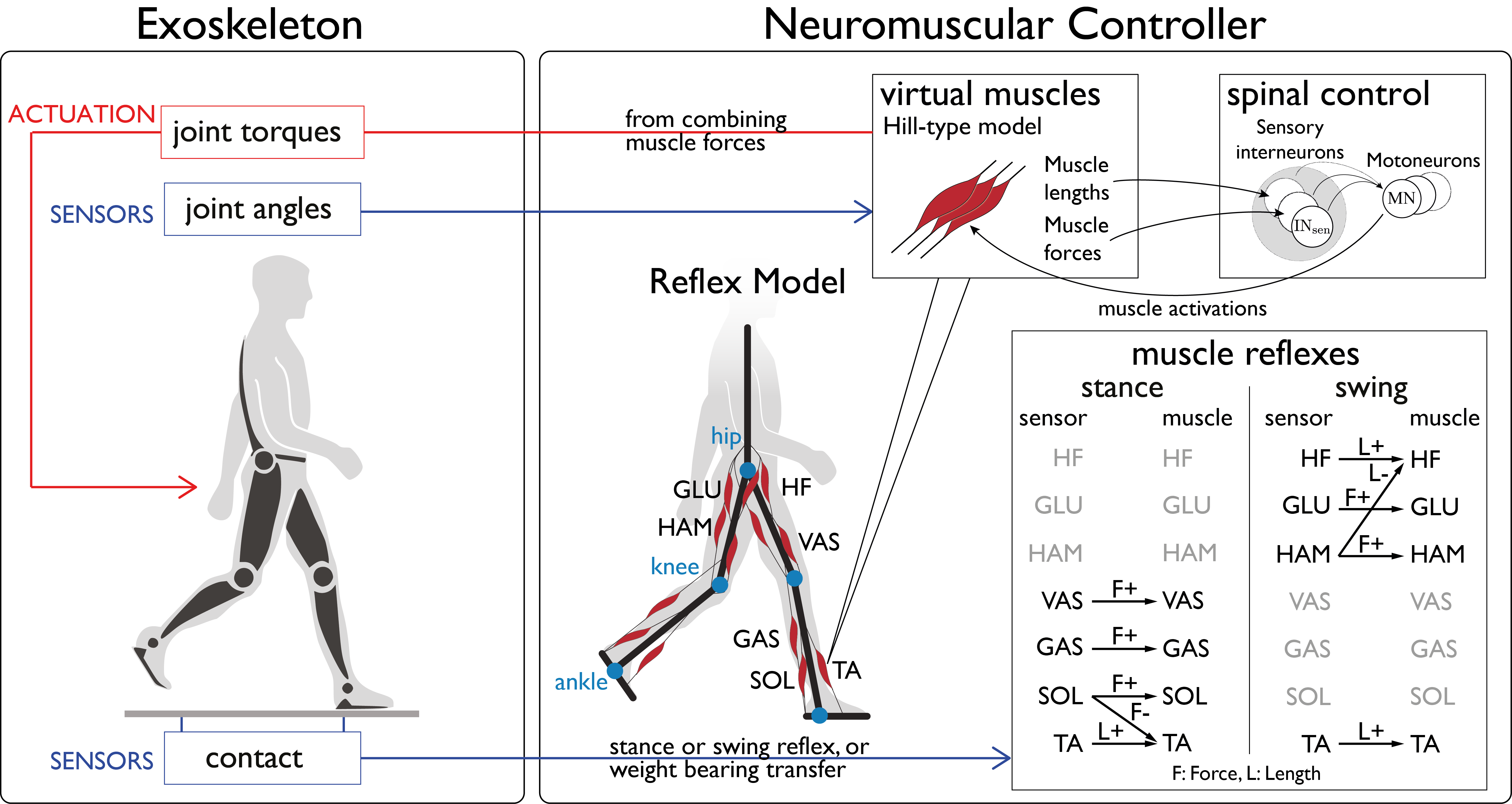
The NMC was based on a sagittal plane neuromechanical simulation developed by Hartmut Geyer, which generates walking by activating simulated muscle reflex loops stimulated by few sensory imputs. Only the foot contact states and joint angles are needed to activate the simulated reflex loops of the Hill-type muscle models. The stance reflexes loop provides weight bearing support during the stance phase, and the swing reflexes allow the leg to flex and swing freely. The muscle forces generated from the virtual muscle dynamics combine to produce knee and hip torque commands to the gait trainer. The advantages of this controller over other approaches include robustness, modularity, and adaptability. In particular, the controller does not require filtering of its inputs (as with myoelectric control), can be decomposed into relevant modules (e.g. only knee or hip control), and can generate walking at different speeds and on different terrains in simulation.
For implementation on hardware, we developed a NMC Simulink library with control modules that allowed for tailoring to specific exoskeleton devices. So far we have tested the NMC on three different devices. The ankle module was tested on powered ankle exoskeleton Achilles, and the knee and hip modules were tested with gait trainer LOPES (both devices are from UTwente). We are currently testing the ankle and knee module on our new wearable exoskeleton. To provide subject-specific control for the SCI subjects, the NMC modules were designed to provide asymmetric control between the right and left legs, between extension and flexion, and among different muscles.
Tests with Human Subjects
We evaluated our controller with both healthy and paraplegic subjects. The modular nature of our controller enables us to test it on several different types of lower limb assistive devices. We evaluated subjects’ walking kinematics and kinetics, muscle activation levels, and metabolic power when possible.
Ankle Control
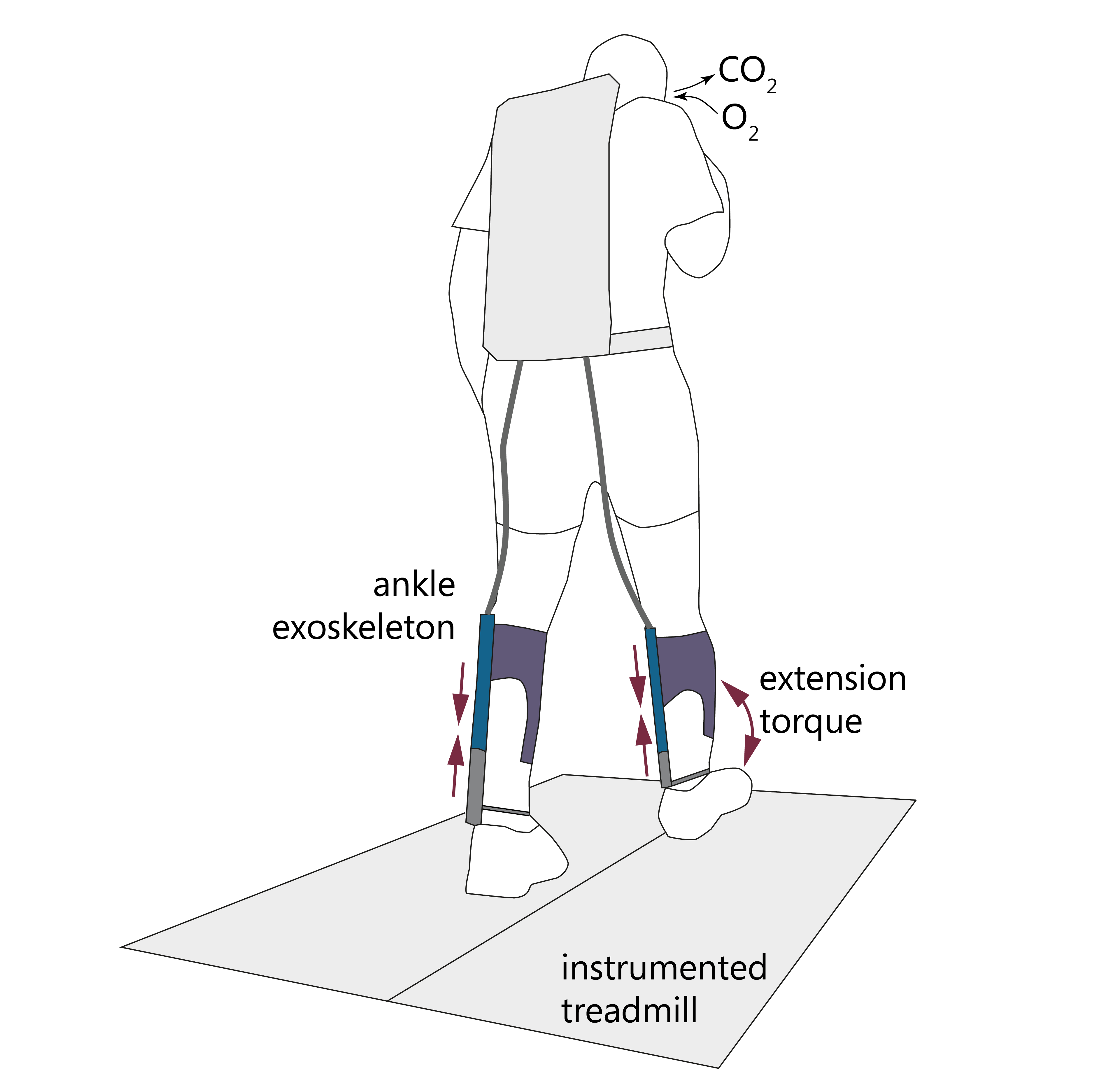
We tested the ankle module of the neuromuscular controller with a powered ankle exoskeleton (UTwente’s Achilles) on healthy subjects and paraplegic test plots with some mobility. For the healthy subjects, we evaluated the mechanics and energetics of walking with such a device and controller. This controller was designed to mimic human reflex patterns during locomotion, which we hypothesized would lead to lower energetic costs compared to walking with the added mass of the device only. Preliminary tests found that healthy-like gait patterns remained intact, and metabolic costs were reduced compared to the transparent mode of the device. Muscle activity of the tibialis anterior and soleus were also reduced with the assistive push-off. Please see Dzeladini et al. 2016 under Publications for more information.
Knee and Hip Control
We evaluated the neuromuscular controller on a lower-limb knee and hip robotic gait trainer (UTwente’s LOPES) with seven pilots with paraplegia (four complete, two incomplete) and one healthy subject. We determined that the NMC could enable normal-like walking gait kinematics at various walking speeds. We found that SCI pilots could walk at a range of normal walking speeds– from 0.6 m/s to 1.4 m/s. Despite a few differences between NMC-produced torques and healthy biological torques, the SCI joint kinematics were similar to healthy kinematics. With few sensors and no predefined gait patterns for multiple speeds or different subjects, the NMC could produce various walking patterns based on subject interaction with the environment. Please see Wu et al. 2017 under publications for more information.
WE1: Ankle and Knee Control
Our consortium partners at Delft and UTwente have developed a new ankle and knee wearable exoskeleton. Tests of the NMC with this device on paraplegic pilots are currently ongoing at the Fondazione Santa Lucia, another one of our consortium partners. Since this exoskeleton only actuates the ankle and knee, these pilots already have some volitional control of their hip joint.
WE2: Lower Limb Control (ankle, knee, hip)
Tests of the full lower limb exoskeleton and neurmuscular controller will be conducted in early 2018. These tests will involve paraplegic pilots who do not have volitional control of their hip joints.
S. Berger. Energy consumption optimization and stumbling corrective response for bipedal walking gait.
F. Dzeladini. Implementation of a human feedback-based locomotion and its control by means of a feedforward component inspired by central pattern generators
A. di Russo. Biomechanical analysis of slow walking and stepping behavior in healthy subjects on treadmill
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform.
The owners of these pages are invited to recreate their publication list from Infoscience.
For any assistance, please consult the Infoscience help or contact support.
Electrically tunable giant Nernst effect in two-dimensional van der Waals heterostructures
Simulations of primary and secondary ice production during an Arctic mixed-phase cloud case from the Ny-Ålesund Aerosol Cloud Experiment (NASCENT) campaign
The high flux nano-X-ray diffraction, fluorescence and imaging beamline ID27 for science under extreme conditions on the ESRF Extremely Brilliant Source
Influence of Si3N4 fillers and pyrolysis profile on the microstructure of additively manufactured silicon carbonitride ceramics derived from polyvinylsilazane
Convalescent human plasma candidate reference materials protect against Crimean-Congo haemorrhagic fever virus (CCHFV) challenge in an A129 mouse model
Calibrating and validating the Integrated Valuation of Ecosystem Services and Tradeoffs (InVEST) urban cooling model: case studies in France and the United States
 Ankle Control
Ankle Control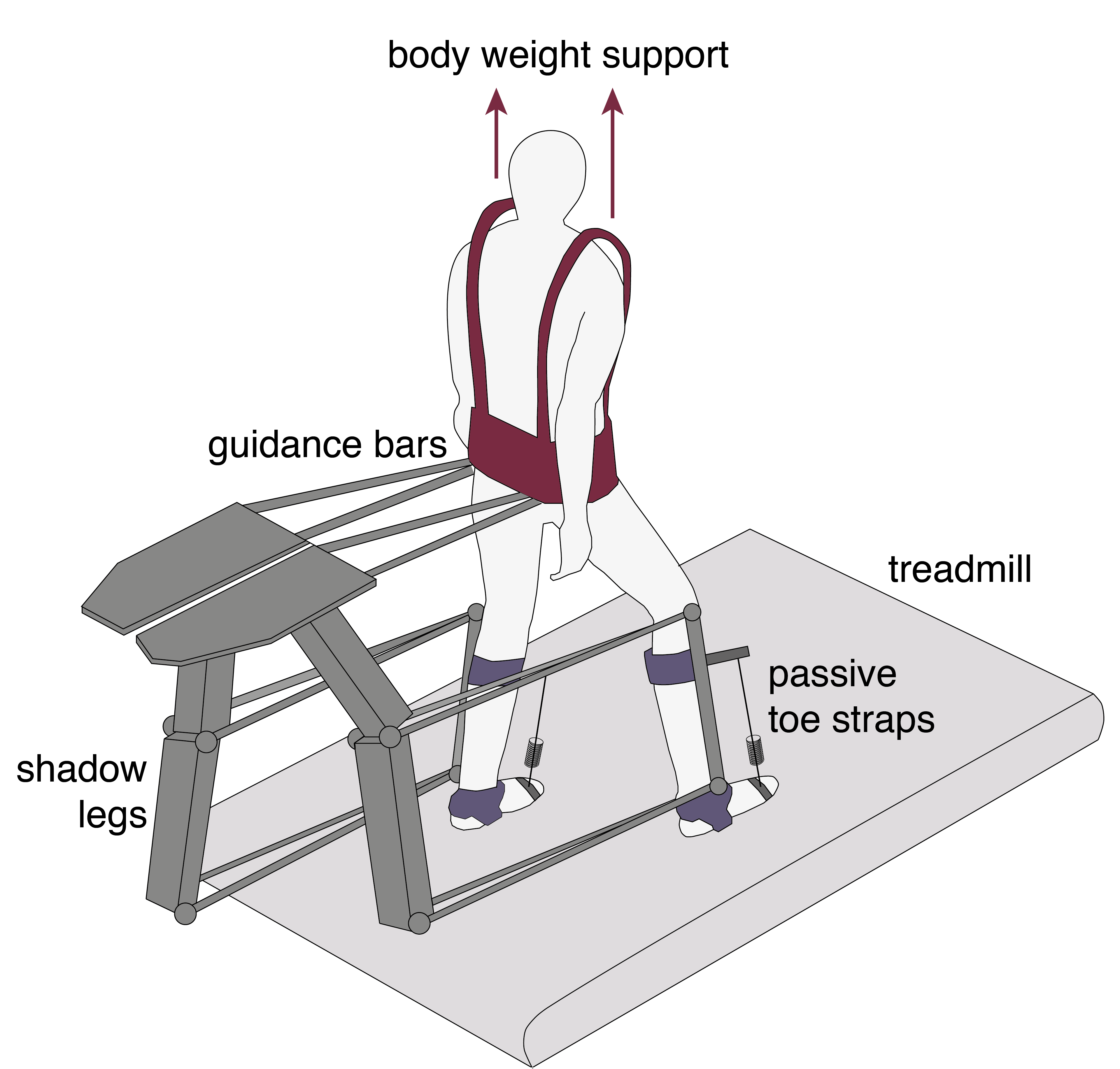 Knee and Hip Control
Knee and Hip Control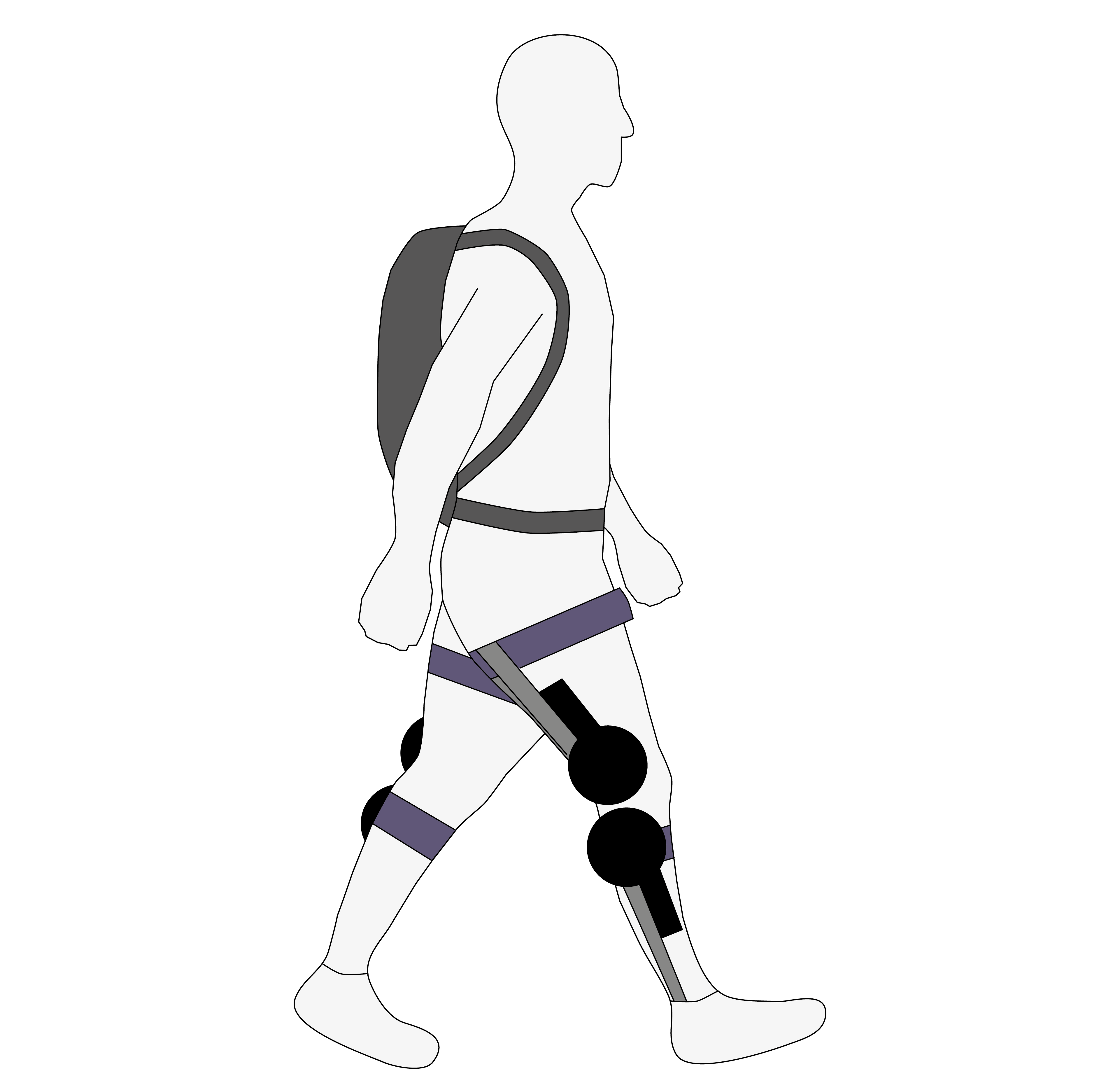 WE1: Ankle and Knee Control
WE1: Ankle and Knee Control