Description
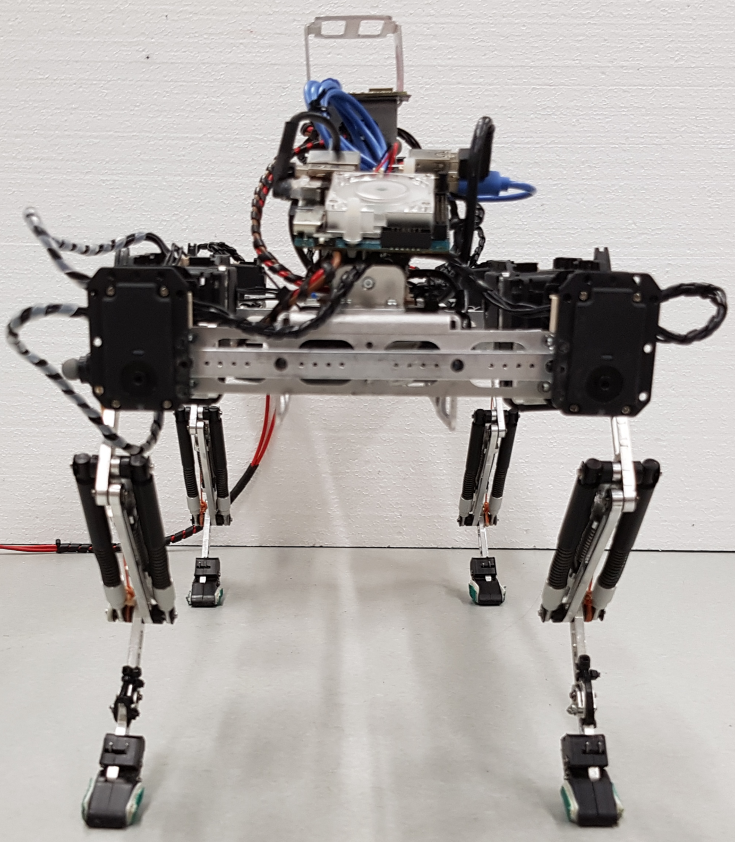
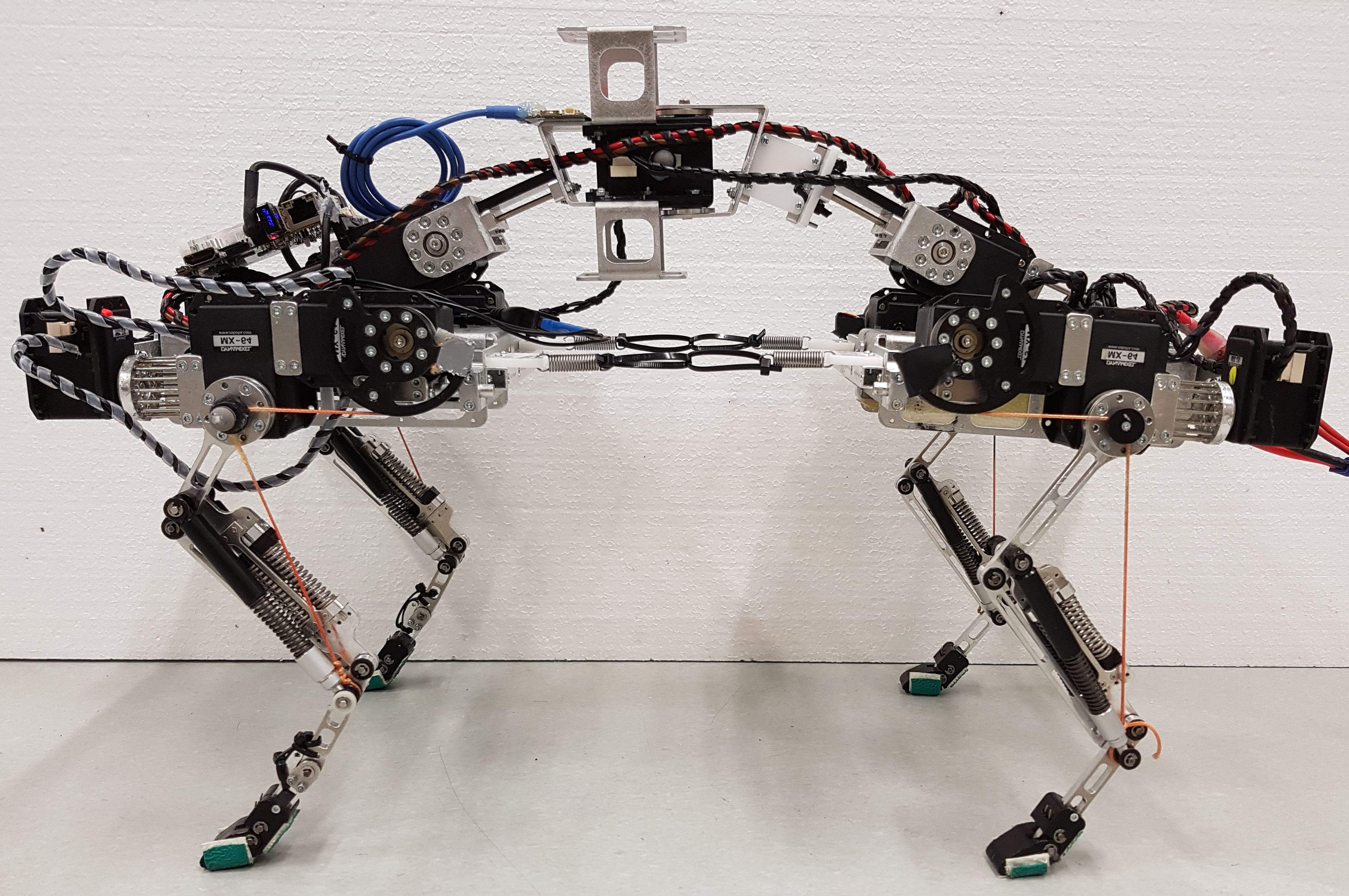
Serval, the last in a line of robot iterations, ismeant to serve as a quadruped for agilemovement. We use the previously researchedmechanisms, control structures and gained knowledge in the electronics development to build a combined and hopefully higher performing robot. Serval consists of an active 3-DOF spine (combining advantages from Lynx and Cheetah-Cub-S), leg units with adduction/abduction mechanism and a scaled ASLP-version of Cheetah-Cub-AL. All motors (DynamixelMX64R and MX28R) are combined with in-series elastics to protect the somewhat sensitive gear-boxes from harmin different load scenarios. The robot is equipped only with a minimal sensor set, consisting of a low-cost, medium-grade IMU. Collaborations started close to the end of this thesis will provide contact and GRF sensing with capacitive sensors as well as a sensitive skin for physical guidance. Control is realized through inverse kinematics for the legs, (for now) offsets in the spine and an underlying CPG-network for pattern generation. Reflexes, like in Oncilla, were not yet implemented, but are ongoing and future work.
Pictures
 |
 |
 |
|
Videos
Related Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Towards rich motion skills with the lightweight quadruped robot Serval
Adaptive Behavior. 2020-06-01. Vol. 28, num. 3, p. 129-150. DOI : 10.1177/1059712319853227.Towards Rich Motion Skills with the Lightweight Quadruped Robot Serval – A Design, Control and Experimental Study
2018-07-28. 15th International Conference on Simulation of Adaptive Behavior, SAB 2018, Frankfurt/Main, Germany, August 14-17, 2018. p. 41-55. DOI : 10.1007/978-3-319-97628-0_4.Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.