Summary
Comparing the effects of morphological variation in locomotion using a salamander-like robot to salamanders locomotor system
The salamander robot at BioRob has been designed according to the main characteristics of a salamanders locomotor system. After several years of testing and improving the hardware and the gait control, this project analysed the gait performance for different parameters and compared the results to the natural reference. The robot has been tested in walking and swimming mode. Every experiment has been tracked with cameras to calculate the speed and the body shape at any point.
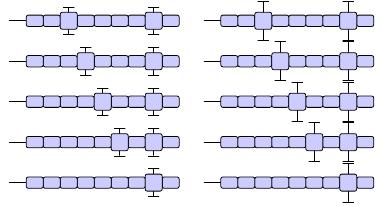
Fig. 1: Different morphologies used in the experiments (schematic top view of the robot).
These experiments led to a data set where the influence and the trend of each varied value can be analyzed. The evaluation and interpretation of the obtained results lead to a selection of the fastest robot setup for terrestrial walking and swimming. A combination of these trends is used for an estimation about the fastest configuration for an amphibian operation of the robot. Assuming, that the natural development already optimized the morphology of salamanders, they are compared with the best suited configuration for the robot. The observed trends about the morphology of salamanders is in good coincidence with the same characteristics of the selected robot configurations obtained by the experimental optimization. This result allows to state a similar behaviour of the locomotor system of a salamander and the robot. Although the robot emulates the salamanders locomotion in a very simplified manner, it underlies the same trends as real salamanders.
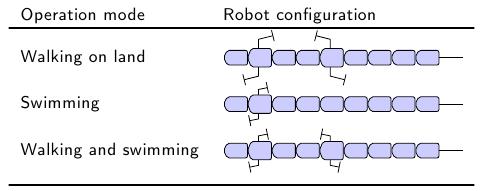
Fig. 2: Conclusion: recommended robot configurations.