Ibrahim Youssef, spring semester 2018
Summary
This semester project evaluated the effectiveness of using a novel haptic feedback interface as the sole means of accomplishing a complex task. The feedback strategy made use of a set of soft, flexible electroadhesive clutch plates. This interface was able to constrain the motion of the elbow joint when stimulated by a high voltage. A mobile robot was designed and wirelessly connected to an embedded microprocessor on the haptic interface. The objective was to guide the robot out of a simple obstacle course using only the haptic feedback. The device operators were stripped of all auditory and visual feedback, ensuring that the haptic sleeve was the sole source of feedback information. The system was then tested by 3 volunteers, who were able to successfully respond to the haptic feedback.
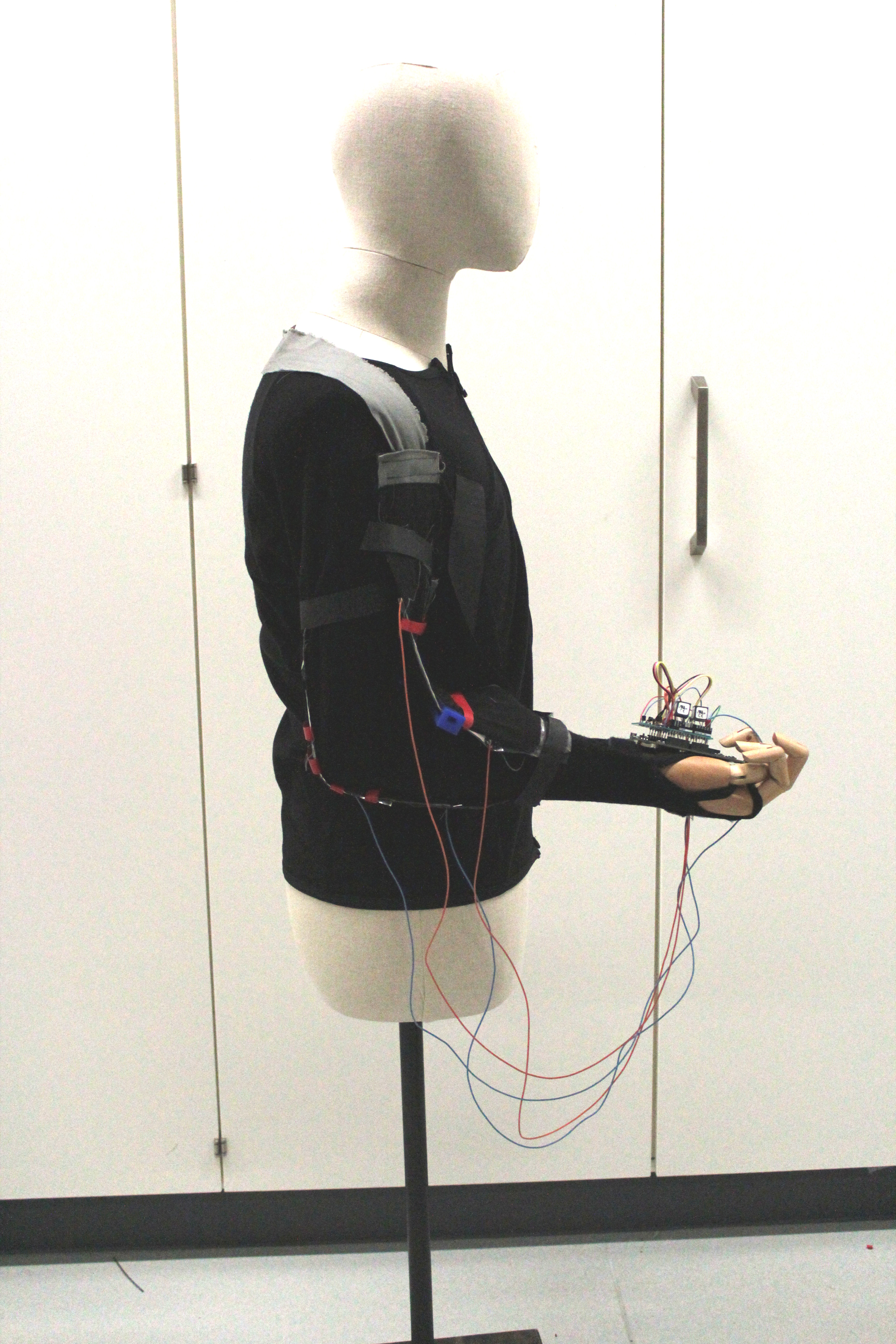
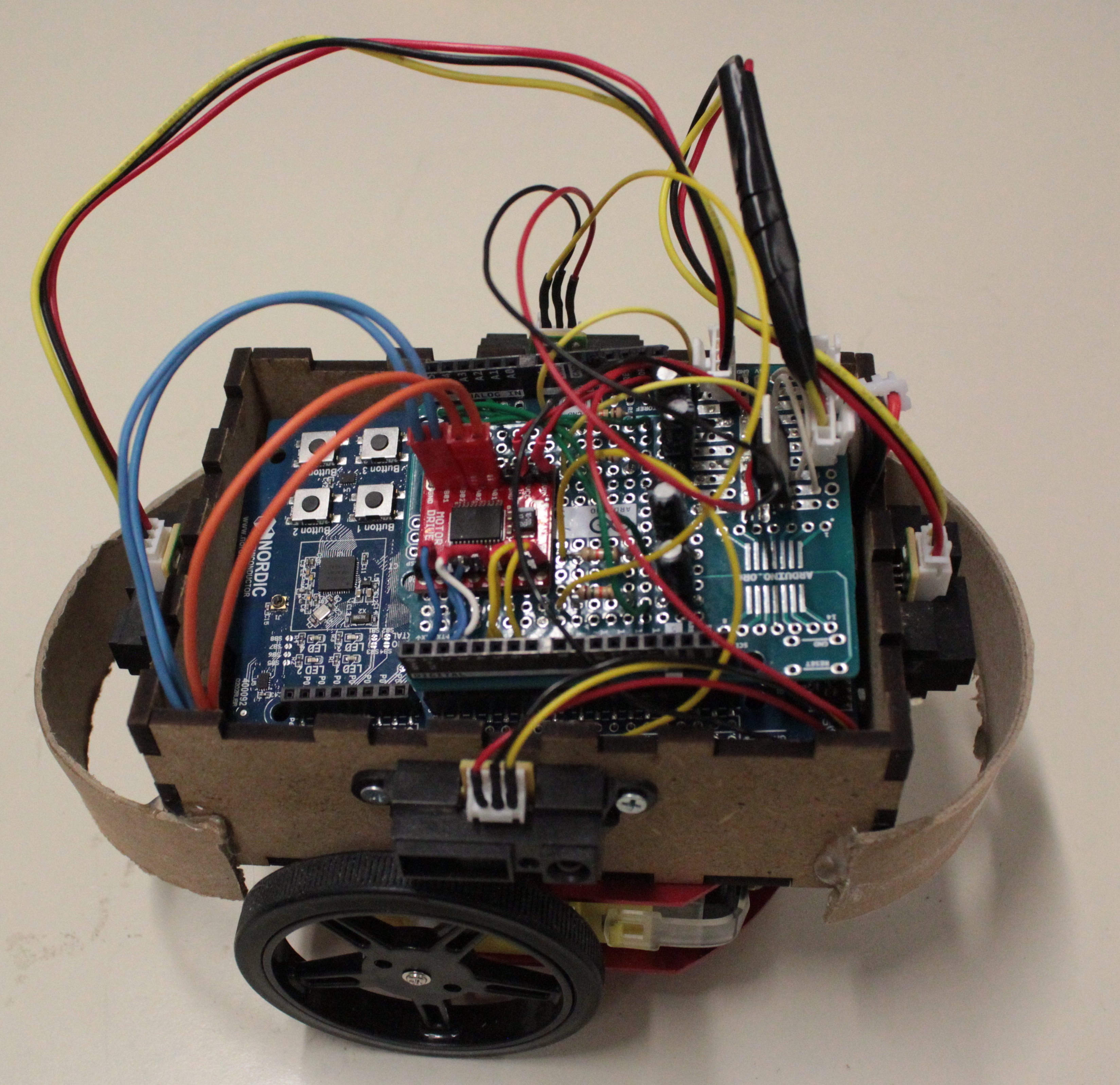
Figure 1: Haptic sleeve (left) and mobile robot (right)
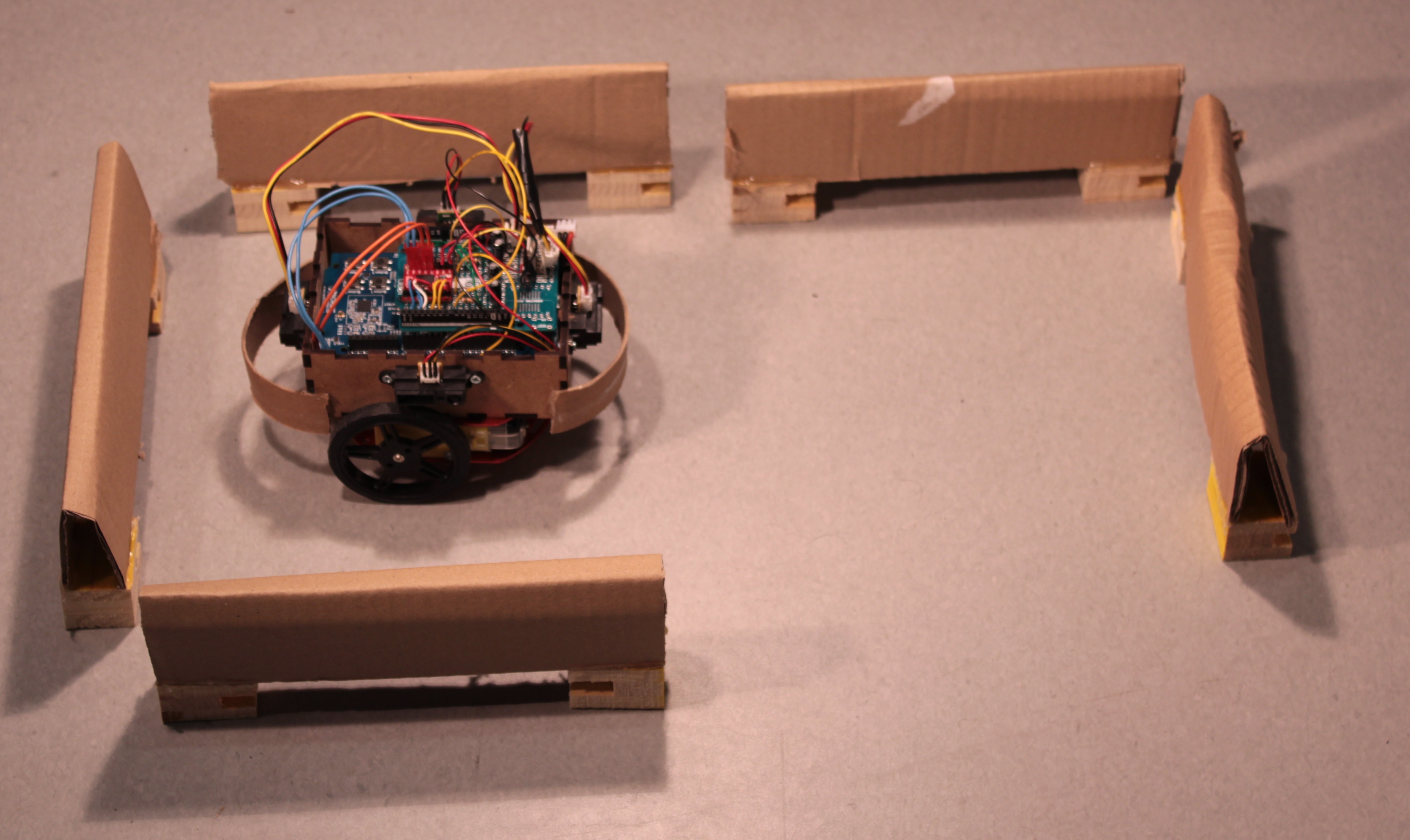
Figure 2: Obstacle course to test haptic interface
Files
Clutch plate test (activation/deactivation by proximity sensor)