The general approach in robotics is to design the robot hardware, then the controller of the robot for the given task. In case of the modular robots, generally the controllers for the hand designed structures are optimized even though they can assemble into many different structures. This master project presents a co-evolutionary approach to design robots composed of the Roombots modules and additional passive elements. The encoding method which is based on L-systems and inspired from biological developmental process combines the controller and the morphology. A language composed of build commands for the Roombots is used for the L-systems. Fast, energy efficient and safe locomotion is used as the desired performance of the evolution in the experiments. The proposed system is capable of integrating with further building blocks. Passive telescopic legs are added to the system. A variety of gaits for the Roombots are explored with and without passive legs. Faster gaits are evolved with passive legs.
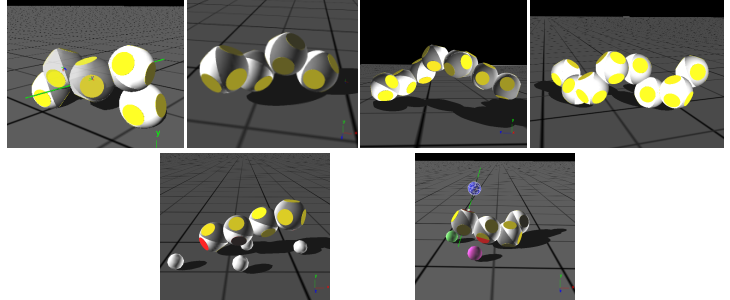
Evolved Robots