JUSThink
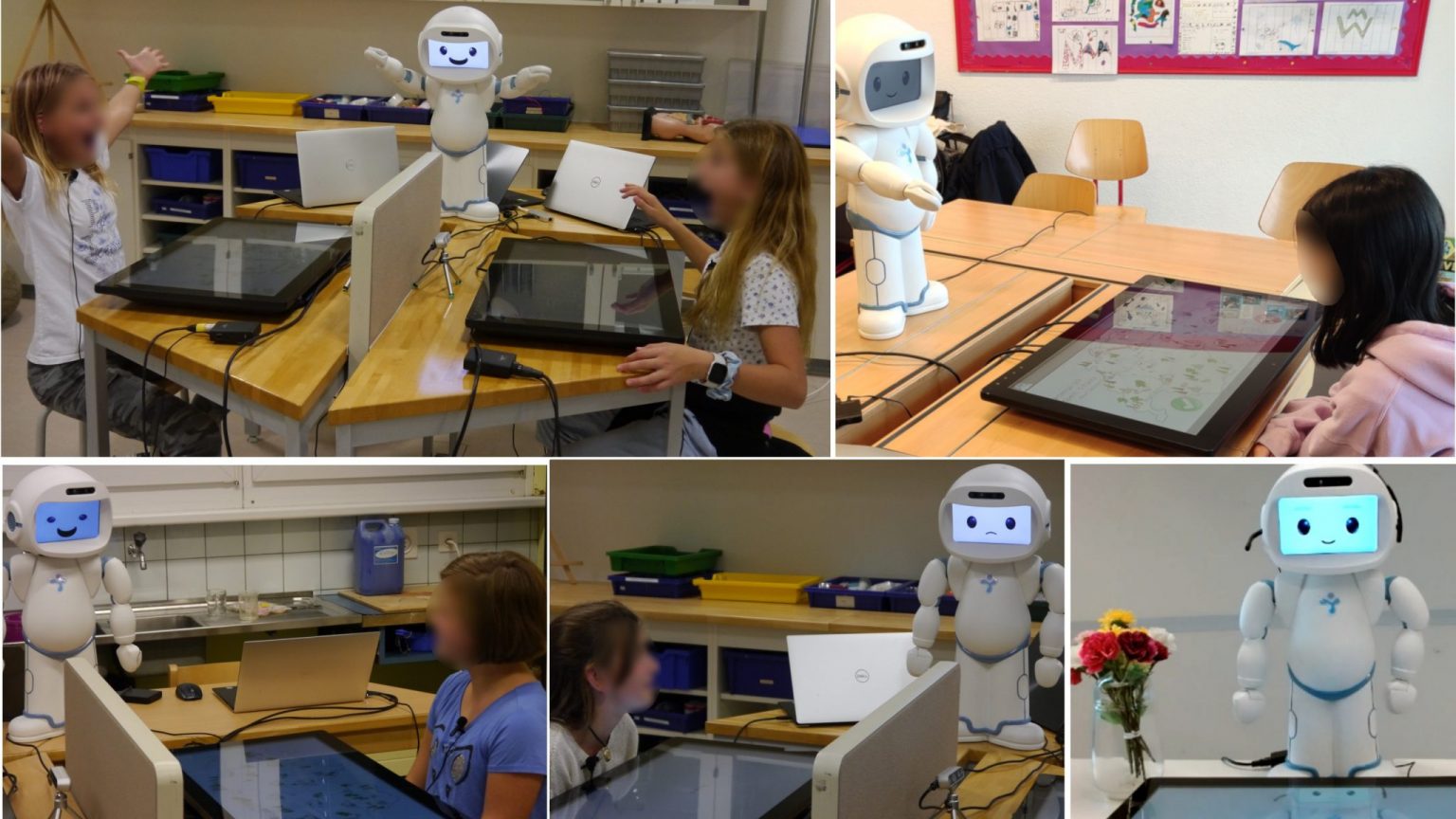
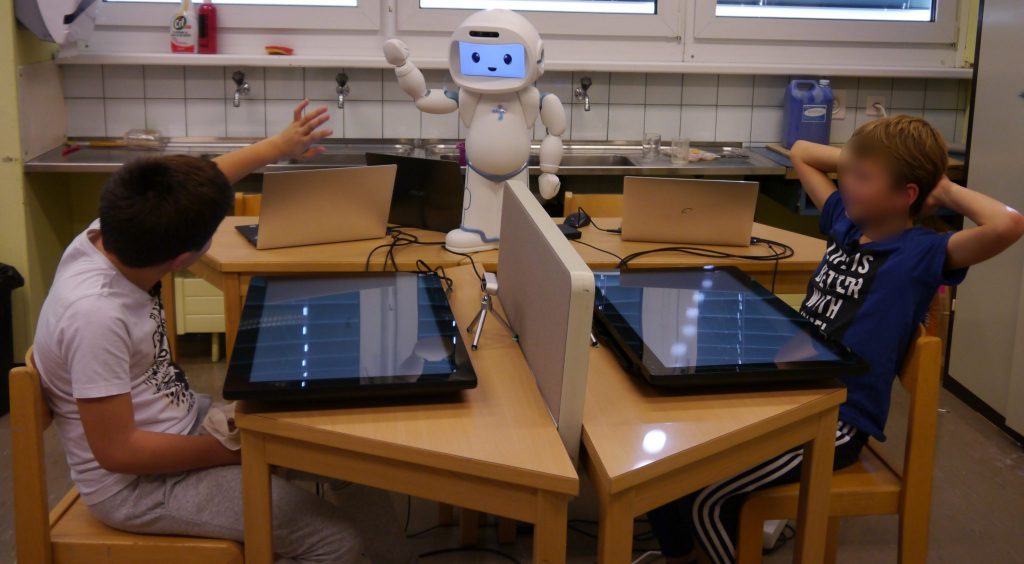
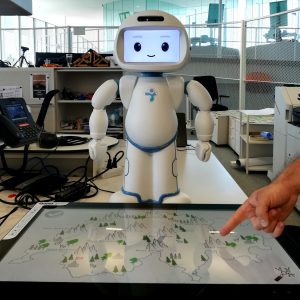
JUSThink project aims to improve the computational thinking skills of children, by exercising algorithmic reasoning with and through graphs, where graphs are posed as a way to represent, reason with and solve a problem. It targets at fostering children’s understanding of abstract graphs through a collaborative problem-solving task mediated by a humanoid robot (QTrobot).
Our goal is to build intelligent autonomous social robots that can promote children’s learning by assisting teachers through complementary activities; by equipping the robot with:
- the ability to understand engaging behaviors of students that are conducive to learning and provide suggestions accordingly: lead by Jauwairia Nasir
- mutual understanding skills so that the robot can “put itself in the child’s shoes”: lead by Utku Norman
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 765955 (the ANIMATAS Project).
- Jauwairia Nasir, Barbara Bruno, & Pierre Dillenbourg. (2021). PE-HRI-temporal: A Multimodal Temporal Dataset in a robot mediated Collaborative Educational Setting [Data set]. Zenodo. https://doi.org/10.5281/zenodo.5576058
- Nasir, Jauwairia, Norman, Utku, Bruno, Barbara, Chetouani, Mohamed, & Dillenbourg, Pierre. (2021). PE-HRI: A Multimodal Dataset for the study of Productive Engagement in a robot mediated Collaborative Educational Setting [Data set]. Zenodo. https://doi.org/10.5281/zenodo.4633092
- Norman, Utku, Dinkar, Tanvi, Nasir, Jauwairia, Bruno, Barbara, Clavel, Chloé, & Dillenbourg, Pierre. (2021). JUSThink Dialogue and Actions Corpus (v1.0.0) [Data set]. Zenodo. https://doi.org/10.5281/zenodo.4627104
- Python Package for JUSThink Human-Robot Activities. (2022). GitHub. Retrieved from https://github.com/utku-norman/justhink_world/
- ROS Wrappers for JUSThink Human-Robot Pedagogical Scenario. (2022). GitHub. Retrieved from https://github.com/utku-norman/justhink-ros
- JUSThink Pre-experiment Analysis in the IEEE RO-MAN 2022 Paper. (2022). GitHub. Retrieved from https://github.com/utku-norman/justhink-preexp-analysis
- Norman, Utku, Dinkar, Tanvi, Bruno, Barbara, & Clavel, Chloé. (2021). JUSThink Alignment Analysis in the Dialogue & Discourse Paper (v1.1.0). Zenodo. https://doi.org/10.5281/zenodo.4675070















Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
2023
An HMM-based Real-time Intervention Methodology for a Social Robot Supporting Learning
2023-01-01. 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Busan, SOUTH KOREA, AUG 28-31, 2023. p. 2204-2211. DOI : 10.1109/RO-MAN57019.2023.10309430.Robots for Learning 7 (R4L): A Look from Stakeholders’ Perspective
2023-01-01. 18th Annual ACM/IEEE International Conference on Human-Robot Interaction (HRI), Stockholm, SWEDEN, Mar 13-16, 2023. p. 935-937. DOI : 10.1145/3568294.3579958.Computational Models of Mutual Understanding for Human-Robot Collaborative Learning
Lausanne, EPFL, 2023.2022
Many are the ways to learn: Identifying multi-modal behavioral profiles of collaborative learning in constructivist activities (vol 16, pg 485, 2021)
International Journal Of Computer-Supported Collaborative Learning. 2022-05-12. DOI : 10.1007/s11412-022-09368-8.A Case for the Design of Attention and Gesture Systems for Social Robots
2022-01-01. 14th International Conference on Social Robotics (ICSR) – Social Robots for Assisted Living and Healthcare, Emphasizing on the Increasing Importance of Social Robotics in Human Daily Living and Society, Florence, ITALY, Dec 13-16, 2022. p. 367-377. DOI : 10.1007/978-3-031-24667-8_33.Introducing Productive Engagement for Social Robots Supporting Learning
Lausanne, EPFL, 2022.Personalized Productive Engagement Recognition in Robot-Mediated Collaborative Learning
2022. 24th ACM International Conference on Multimodal Interaction (ICMI), Bangalore, India, November 7-11, 2022. p. 632-641.Temporal Pathways to Learning: How Learning Emerges in an Open-ended Collaborative Activity
Computers & Education: Artificial Intelligence. 2022. Vol. 3, p. 100093. DOI : 10.1016/j.caeai.2022.100093.Efficacy of a ‘Misconceiving’ Robot to Improve Computational Thinking in a Collaborative Problem Solving Activity: A Pilot Study
2022. 31st IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Naples, Italy, August 29 – September 2, 2022. DOI : 10.1109/RO-MAN53752.2022.9900775.Studying Alignment in a Collaborative Learning Activity via Automatic Methods: The Link Between What We Say and Do
Dialogue & Discourse. 2022-08-06. Vol. 13, num. 2, p. 1-48. DOI : 10.5210/dad.2022.201.What if Social Robots look for Productive Engagement?
International Journal of Social Robotics. 2022. Vol. 14, p. 55–71. DOI : 10.1007/s12369-021-00766-w.2021
Mutual Modelling Ability for a Humanoid Robot: How can it improve my learning as we solve a problem together?
2021-03-12. Robots for Learning Workshop in 16th annual IEEE/ACM Conference on Human-Robot Interaction (HRI 2021), Virtual Conference, March 9-11, 2021.Many Are The Ways to Learn: Identifying multi-modal behavioral profiles of collaborative learning in constructivist activities
International Journal of Computer-Supported Collaborative Learning. 2021. Vol. 16, p. 485–523. DOI : 10.1007/s11412-021-09358-2.A Social Robot That Looks For Productive Engagement
2021. Robots for Learning workshop at 16th annual ACM/IEEE International Conference on Human-Robot Interaction, Online conference, March 9-11, 2021.2020
When Positive Perception of the Robot Has No Effect on Learning
2020-08-31. 29th IEEE International Conference on Robot and Human Interactive Communication (IEEE RO-MAN), Virtual Conference, Aug 31 – Sept 4, 2020. p. 313-320. DOI : 10.1109/RO-MAN47096.2020.9223343.Is There ‘ONE way’ of Learning? A Data-driven Approach
2020. 22nd ACM International Conference on Multimodal Interaction, Virtual event, Netherlands, October 25-29, 2020. p. 388–391. DOI : 10.1145/3395035.3425200.You Tell, I Do, and We Swap until we Connect All the Gold Mines!
ERCIM News. 2020-01-01. Vol. 2020, num. 120, p. 22-23.
