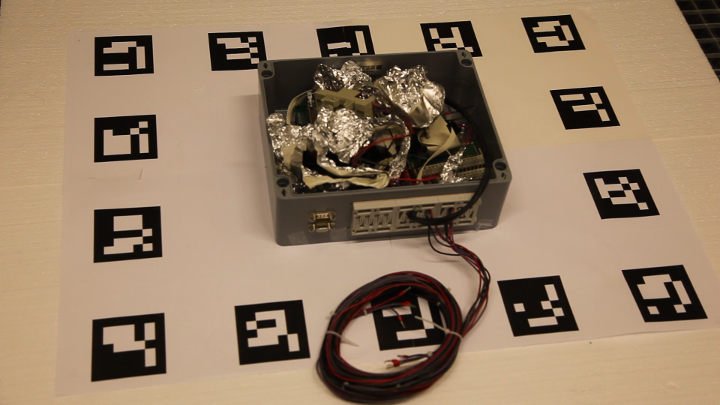
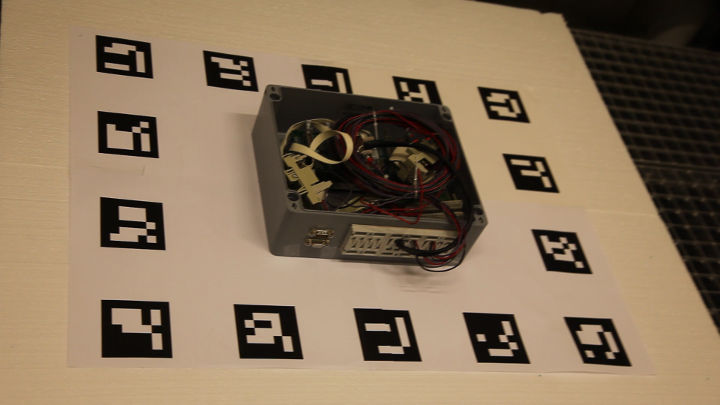
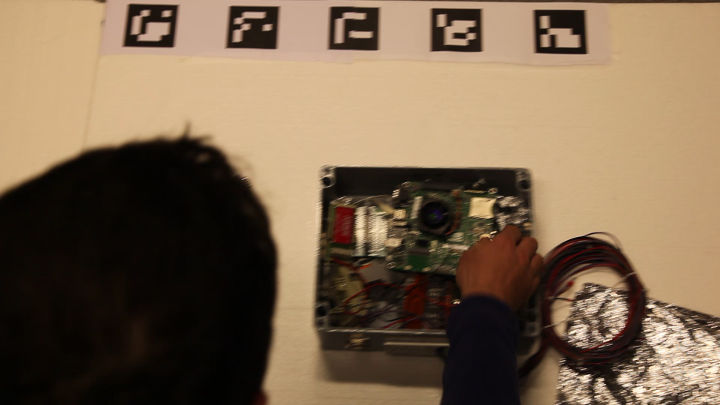
The dataset challenge consists in tracking 3 rigid, poorly textured, highly occluded objects across sequences of monocular RGB images.
For each object dataset, we provide:
- a simple CAD model of the object (.obj)
- several learning videos
- one or more testing videos
- the groundtruth pose of the camera wrt the object reference system for all the learning videos
- a simple Matlab script Test.m showing how to employ the pose groundtruth.
BOX
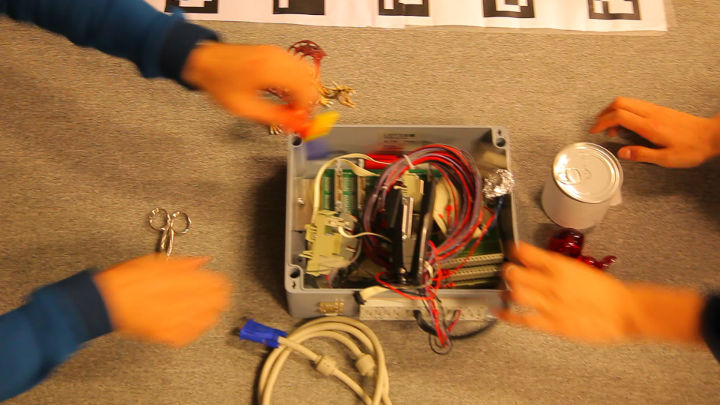
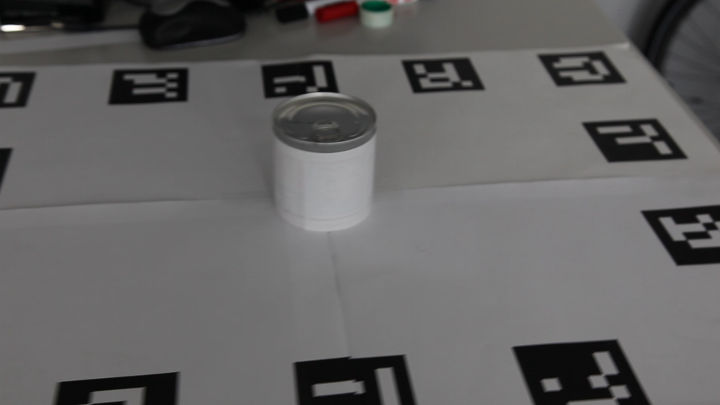
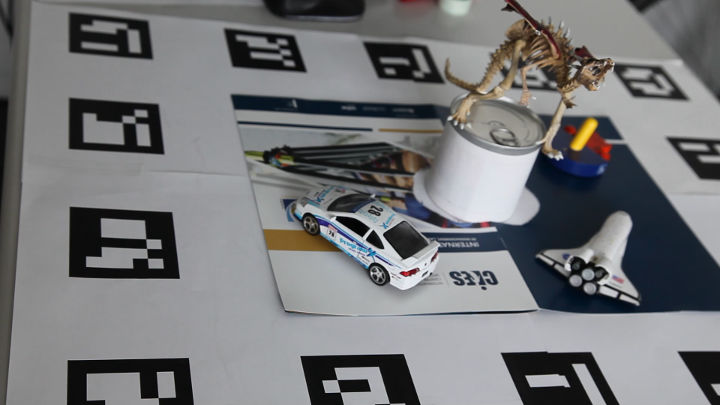
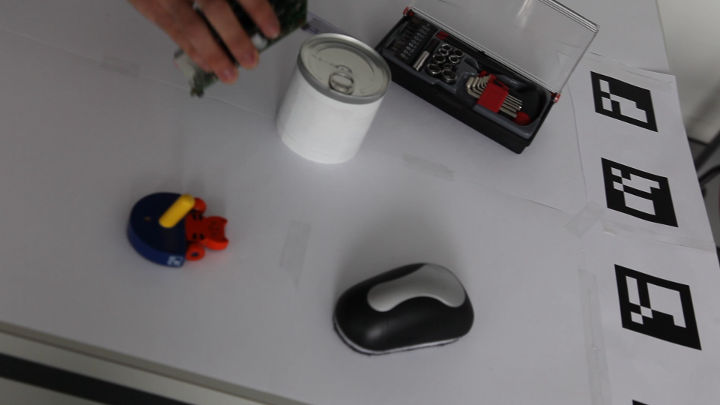
CAN

DOOR



2D ANNOTATIONS
Additionally, we provide accurate manual annotations of some parts of the target objects on the testing sequences. These can be used to test 2D detectors for localizing 3D objects undergoing perspective and light changes.




Part of the manual annotations were kindly provided by Mahdi Rad of the Graz Univertisy of Technology.
DOWNLOAD
Negative video BOX-Learn-video1 BOX-Learn-video2
BOX-Learn-video3 BOX-Learn-video4 BOX-Learn-video5
CAN-Learn-Part1 CAN-Learn-Part2 CAN-TestAndInfo
DOOR-Learn-Part1 DOOR-Learn-Part2 DOOR-TestAndInfo
EVALUATION
The 3D pose estimation can be evaluated computing the L2 norm of the rotation and translation components of the absolute pose error [2] for all the frame of each video sequence, and evaluating their Cumulative Distribution Function (CDF) .
Quantitative results are provided in [1] in the form of the normalized Area Under Curve (AUC) score for each error. The AUC score is computed dividing the area of the CDF curve by the max error of the graph. The max error was set to 0.5 for both rotation and translation for all frames. See [1] for further details.
DISCLAIMER – CONTACT
BIBLIOGRAPHY
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
A Novel Representation of Parts for Accurate 3D Object Detection and Tracking in Monocular Images
2015. International Conference on Computer Vision (ICCV), Santiago, Chile, December 13-16, 2015. p. 4391–4399. DOI : 10.1109/ICCV.2015.499.[2] Sturm, J., Engelhard, N., Endres, F., Burgard, W., & Cremers, D. A benchmark for the evaluation of RGB-D SLAM systems. IROS 2012