
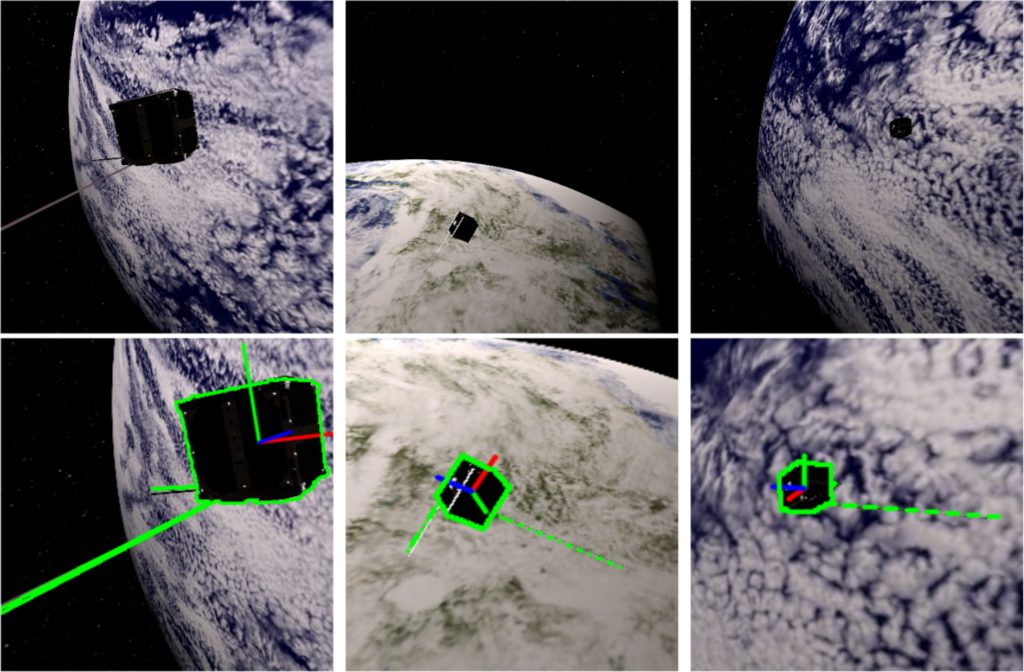
Estimating the relative 6D pose of an object, that is, its 3 rotations and 3 translations with respect to the camera from a single image is crucial in many applications.
Most traditional methods address this problem by first detecting keypoints in the input image, then establishing 3D-to-2D correspondences, and finally running a Perspective-n-Point algorithm. Unfortunately, this often fails in the presence of severe occlusions and cluttered backgrounds.
To improve robustness, we have several end-to-end trainable networks depicted that yield reliable and scale-insensitive 6D poses. These will be tested in harsh spatial conditions in the context of the ClearSpace-1 project, whose chaser satellite will be launched to retrieve and de-orbit a non-operational satellite in 2025.
Software:
https://github.com/cvlab-epfl/wide-depth-range-pose
https://github.com/cvlab-epfl/single-stage-pose
https://github.com/cvlab-epfl/segmentation-driven-pose
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Wide-Depth-Range 6D Object Pose Estimation in Space
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
2021-06-25
Conference on Computer Vision and Pattern Recognition (CVPR), Virtual, June 19-25, 2021.p. 15870-15879
DOI : 10.1109/CVPR46437.2021.01561
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Single-Stage 6D Object Pose Estimation
2020 Ieee/Cvf Conference On Computer Vision And Pattern Recognition (Cvpr)
2020-06-16
Computer Vision and Pattern Recognition (CVPR), Seattle, Washington, June 16 – 18, 2020.p. 2927-2936
DOI : 10.1109/CVPR42600.2020.00300
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Segmentation-driven 6D Object Pose Estimation
2019 Ieee/Cvf Conference On Computer Vision And Pattern Recognition (Cvpr 2019)
2019-06-16
Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, California, USA, June 16-20, 2019.p. 3380-3389
DOI : 10.1109/CVPR.2019.00350