To avoid collisions and other threads, we propose approaches to detect flying objects such as UAVs and aircrafts, even when they only occupy a small portion of the field of view, are possibly moving against complex backgrounds, and are filmed by a camera that itself moves.
Realistic Synthetic Data Generation
We propose a novel approach to synthesizing images that are effective for training object detectors. Starting from a small set of real images, our algorithm estimates the rendering parameters required to synthesize similar images given a coarse 3D model of the target object. These parameters can then be reused to generate an unlimited number of training images of the (…)
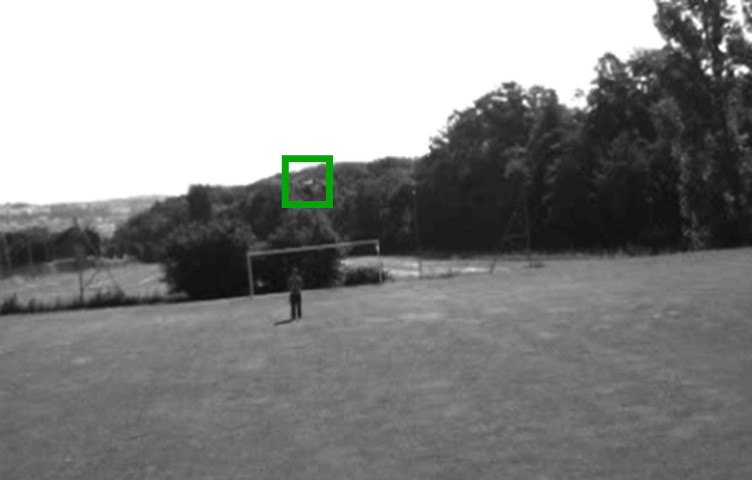
Flying Object Detection from a Single Moving Camera
We propose an approach to detect flying objects such as UAVs and aircrafts when they occupy a small portion of the field of view, possibly moving against complex backgrounds, and are filmed by a camera that itself moves.Detecting a small drone against a complex moving background. (Left) It is almost invisible to the human eye and hard to detect from (…)