In this project, we will focus on driving assistance by localized trajectory recommendations and warning signals to improve driver safety and overall traffic fluidity. These recommendations (e.g., suitable speed, suggested or not recommended lane change) for regular, but not dangerous, settings and warnings (e.g., vehicle in the blind angle, collision ahead) for potentially critical situations will be computed using both an embedded intelligent sensory system and collaboration through car-to-car communication with other vehicles. The intelligent vehicle will continuously gather information about the surrounding traffic context and driver behavior, generate an assessment of the situation, and react in an as transparent as possible way whilst leaving the ultimate decision to perform those suggestions to the driver. We will study the impact of having such a driving assistance system deployed on a more or less important fraction of the vehicles sharing a given road segment. We will consider and reproduce, in simulation, realistic traffic scenarios, including critical situations (e.g., stopped vehicle on a given lane, lane merging). We will provide a validation of our algorithmic and theoretical finding using Webots, a fast prototyping and simulation tool for mobile robotics lately adapted to realistically reproduce the dynamics of multiple Ackerman steering vehicles in combination with a dedicated plug-in of a realistic network simulator (OmNet++). Simulation calibration using real data and later on, deployment on a real car, will be possibly considered.
Team and Collaborators
Sponsors and Research Period
EPFL
Videos
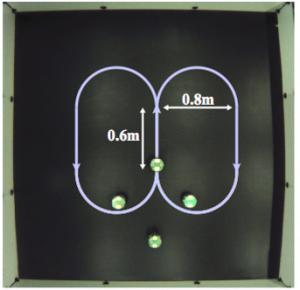
Example of Active Collision Avoidance (or here):
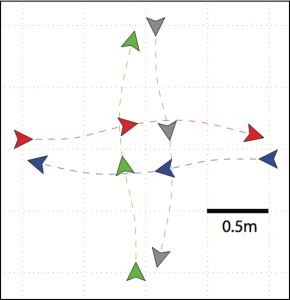
4 vehicles achieving the rectangular formation with a leader (or here):
Matlab simulation of 6 vehicles without CAS
Matlab simulation of the same 6 vehicles with CAS
A Realistic Simulator for the Design and Evaluation of Intelligent Vehicles
The number of vehicles hitting the road each day is rapidly increasing, and several problems, such as traffic conges- tion or driver safety, can no longer be solved in the same fashion as before. Intelligent transportation systems could potentially solve part of these problems, but prototyping, designing and testing cooperative smart vehicles is a cumbersome task. This paper presents a realistic simulator where intelligent vehicles can be designed and analyzed with a pragmatic approach. A number of advances in robotics have already been transferred to vehicular technology, with a potential increase of this trend into the future. Here, we develop a plugin for a well-established robotics simulator (Webots), in order to reinforce at the virtual level this cross-fertilization between the two areas and create a baseline for realistic studies of future solutions in real intelligent vehicles.
This Webots plugin is available here.
Videos are here.
Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.