Distributed Robust Multi-Robot Learning using Particle Swarm Optimization
The goal of this project is the automatic design of high-performing robust controllers for mobile robots using exclusively on-board resources. In our evaluative approach, a population-based, on-line machine-learning technique automatically shapes the robots’ behaviors by direct interaction with the real environment. This constitutes an expensive optimization problem as the time needed to evaluate candidate solutions is substantially larger than that required by the metaheuristic operators in the algorithm. In order to accomplish our goal, we must address two research questions. Firstly, we need to determine how to optimally allocate evaluation time for fast and robust adaptation, as evaluation time is the most critical resource in the process. Secondly, we need to define effective information sharing and cooperation mechanisms in our distributed system, as excessive sharing could lead to early stagnation, while limited sharing may slow down the convergence of the algorithm.
National Center of Competence in Research Robotics (NCCR Robotics) and SNSF grant
Videos
Warning
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Warning
Embed of video is only possible from Mediaspace, Vimeo or Youtube
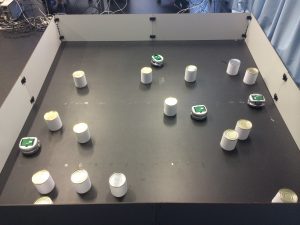
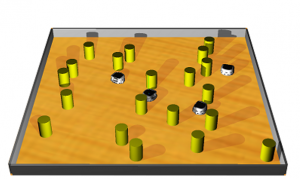
Video of 4 robots learning obstacle avoidance using distributed PSO
Publications
Warning
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform.
The owners of these pages are invited to recreate their publication list from Infoscience.
For any assistance, please consult the Infoscience help or contact support.
2016
Measurements of the Higgs boson production and decay rates and constraints on its couplings from a combined ATLAS and CMS analysis of the LHC pp collision data at $ \sqrt{s}=7 $ and 8 TeV
2015.IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, September 28 – October 02, 2015. p. 2958-2965. DOI : 10.1109/IROS.2015.7353785.
2015.13th European Conference on Artificial Life (ECAL 2015), York, United Kingdom, 20-24 July 2015. p. 302-309. DOI : 10.7551/978-0-262-33027-5-ch056.
2015.IEEE International Conference on Robotics and Automation, Seattle, Washington, USA, May 26-30, 2015. p. 5970-5976. DOI : 10.1109/ICRA.2015.7140036.
2014.International Symposium on Distributed Autonomous Robotic Systems, Baltimore, Maryland, USA, November 8-11, 2012. p. 383-396. DOI : 10.1007/978-3-642-55146-8_27.
The Effect of the Environment in the Synthesis of Robotic Controllers: A Case Study in Multi-Robot Obstacle Avoidance using Distributed Particle Swarm Optimization