The future of integrated systems lies in their ability to be reactive, adaptive, ubiquitous and reliable. Regardless their field of application, in order to be successful, they will need to carry out their task in an efficient and safe manner, without polluting or disturbing the target environment, which may be a river or the human body. As research advances, it appears more and more clearly that the future integrated systems fulfilling all these requirements will need to be both extremely miniaturized and massively distributed. Indeed, the intrinsic limitations of ultra-small integrated systems in term of sensing, actuation, and control prevent them to carry out a task individually. More specifically, distributed micro-robotic systems (i.e. individual robots smaller than one millimeter in size) hold great promises in a large variety of disciplines such as biomedical engineering, pervasive and ambient information technology, environmental engineering, and space exploration. However, there are at least two main obstacles lying on the route to functional swarms of micro-robots: (i) our inability to manufacture and package hybrid MEMS devices endowed with the three essential features of a robotic node, i.e. sensing, actuation, and control, and (ii) the lack of suitable control strategies and modeling methodologies for distributed robotic systems at this size range.
From this perspective, one need suitable methodologies for designing, fabricating, and controlling distributed intelligent systems in scalable fashion. Here, the concept of scalability is two-fold; a system can be scalable either in terms of size of the individual nodes (extremely miniaturized) or in terms of size of the swarm (massively distributed). From a control point of view, there is no evidence whatsoever that even cutting-edge distributed control strategies are scalable in either term since there is no experimental platform available for validating these strategies. Our research is primarily concerned with the development and the validation of actually scalable methodologies, with a strong emphasis on the model-based design and control of distributed intelligent systems, in close collaboration with another PhD student, supervised by Juergen Brugger, who will be responsible for the fabrication of these systems using a full breadth of innovative micromachining techniques.
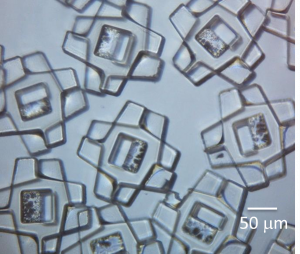
At the heart of this research lies the concept of Self-Assembly (SA), i.e. the autonomous organization of components into an ordered structure. First, SA is envisioned as the key mechanism for packaging functional MEMS building blocks into hybrid functional micro-systems. Second, micro-robots are likely to suffer from a lack of reliability, efficiency, and robustness as individuals, but we expect them to team up for achieving a given task, notably by self-assembling into a superstructure of higher order, complexity, and functionality. As a result, we investigate SA at two different levels: (i) as a manufacturing and packaging method at individual device level and (ii) as a distributed control method for swarms of functional devices.
This project has been initiated as a collaborative effort within the EPFL Center for Integrated Systems. More information here.
Team and Collaborators
- Grégory Mermoud
- Massimo Mastrangeli
- Felix Schill
- Loic Matthey
- Ezequiel Di Mario
In collaboration with:
Sponsors
Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
2016
Fluid-Mediated Stochastic Self-Assembly at Centimetric and Sub-Millimetric Scales: Design, Modeling, and Control
Micromachines. 2016. Vol. 7, num. 8 (Special Issue on “Building by Self-Assembly”), p. 138. DOI : 10.3390/mi7080138.2014
Top-Down vs Bottom-Up Model-Based Methodologies for Distributed Control: A Comparative Experimental Study
2014. 12th International Symposium on Experimental Robotics, New Delhi, India, December 17-21, 2010. p. 615-629. DOI : 10.1007/978-3-642-28572-1_42.2013
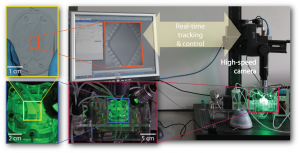
Acousto-fluidic system assisting in-liquid self-assembly of microcomponents
Journal of Micromechanics and Microengineering. 2013. Vol. 23, num. 12, p. 125026. DOI : 10.1088/0960-1317/23/12/125026.Fluid-mediated parallel self-assembly of polymeric micro-capsules for liquid encapsulation and release
Soft Matter. 2013. Vol. 9, p. 9931-9938. DOI : 10.1039/c3sm51923f.Evaluating Efficient Data Collection Algorithms for Environmental Sensor Networks
2013. 10th International Symposium on Distributed Autonomous Robotic Systems, Lausanne, Switzerland, November 1-3, 2010. p. 77-89. DOI : 10.1007/978-3-642-32723-0_6.Beat-Based Synchronization and Steering for Groups of Fixed-Wing Flying Robots
2013. 10th International Symposium on Distributed Autonomous Robotic Systems. p. 281-293. DOI : 10.1007/978-3-642-32723-0_21.A Plume Tracking Algorithm Based on Crosswind Formations
2013. Distributed Autonomous Robotic Systems, Lausanne, Switzerland, November 2010. p. 91-102. DOI : 10.1007/978-3-642-32723-0_7.Energy-Time Efficiency in Aerial Swarm Deployment
2013. 10th International Symposium on Distributed Autonomous Robotic Systems, EPFL, Lausanne, Switzerland, November 1-3, 2010. p. 5-18. DOI : 10.1007/978-3-642-32723-0_1.Distributed Autonomous Robotic Systems
Berlin Heidelberg: Springer, 2013.Self-Organized Robotic Systems: Large-Scale Experiments in Aggregation and Self-Assembly using Miniature Robots
Handbook of Collective Robotics; Singapore: Pan Stanford Publishing, 2013. p. 229-259.2012
Design, Modeling and Optimization of Stochastic Reactive Distributed Robotic Systems
Lausanne, EPFL, 2012.Physical interactions in swarm robotics: the hand-bot case study
2012. 10th International Symposium on Distributed Autonomous Robotic Systems (DARS 2010), Lausanne, Switzerland, November 1-3,2010. p. 585-595. DOI : 10.1007/978-3-642-32723-0_42.Real-Time Automated Modeling and Control of Self-Assembling Systems
2012. 2012 IEEE International Conference on Robotics and Automation, St. Paul, Minnesota, USA, May 14-18, 2012. p. 4266-4273. DOI : 10.1109/ICRA.2012.6224888.2011
Containers assembled in fluid and corresponding production
US2012145572; WO2010122499; WO2010122499.
2011.