Many swarm-robotic tasks require robots to be aware of the location of their nearby teammates. In the past, this has typically been accomplished using some centralized global positioning system which informs robots about the location of themselves and others in global coordinates. Such an approach might be infeasible in some situations if full scalability is required. An attractive alternative is on-board relative positioning, which allows robots to observe the relative location of other nearby robots.
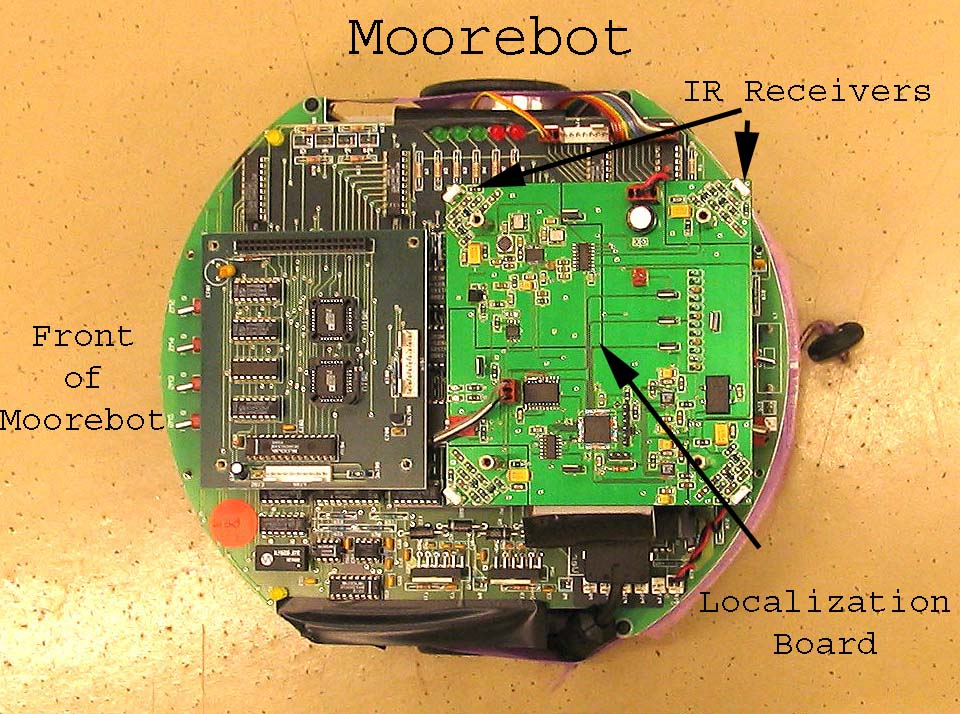
An infrared-based on-board relative positioning and communication system is currently deployed on the Moorebot platform. This system has been shown to be effective for collaborative dead-reckoning and formation movement. A new system for the Khepera III platform which also uses infrared is currently in development which should significantly improve range, accuracy, update rate, and communication speed.
Team and Collaborators
Sponsors
ANSF (CNSE), SNSF, FCT
References
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.