Alice II
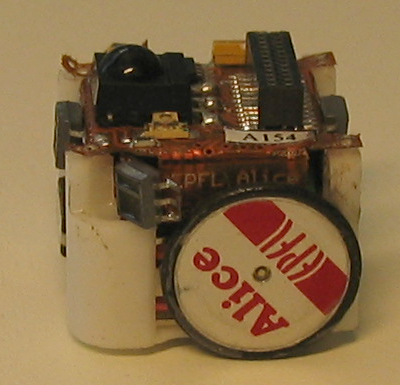
SWIS is equipped with a fleet of 40 Alices II, designed originally by Gilles Caprari at the Autonomous System Laboratory at EPFL (now moved at ETHZ). An Alice II is 2 cm in lenght and endowed with a PIC microcontroller. More information about the Alice can be found here. Dedicated Zigbee-compliant communication and color vision modules have been developed in the framework of the project Distributed Boundary Coverage with a Swarm of Miniature Robots.
E-puck

SWIS is equipped with a fleet of 100 e-puck robots, designed at EPFL in a common effort between the Autonomous Systems Laboratory, SWIS, and the Intelligent Systems Laboratory. An e-puck is 6.5 cm in diameter and endowed with a DSPic microcontroller. More information about the e-puck can be found on its main site. A dedicated Zigbee-compliant communication in the framework of the project The e-puck educational robot and several of them are used as robotic sesnor network in this project Swarm-Intelligent Algorithms for Power and Information Management in Sensor Networks . The e-puck is a open source (both HW and SW) tool. It is produced by GCtronic (Switzerland) and Applied AI Systems (Canada) and commercially supported by K-Team (Switzerland) and Cyberbotics (Switzerland).
Khepera III

The SWIS Group currently possesses 20 Khepera III robots, a more technologically sophisticated successor to the Khepera I and II platforms recently developed by K-Team with development assistance from the SWIS Group. The robot has a diameter of 12 cm, making it appropriate for indoor multi-robot research experiments. Technical specifications can be found on the product homepage. Khepera III robots used at SWIS have been endowed with IEEE 802.11 wireless ability by using the appropriate card with the built-in CompactFlash slot. The robots are currently being used for both general multi-robot search and multi-robot odor localization research projects. For these purposes, the SWIS Group is finalizing development of Khepera III extension modules for sound sensing, odor detection, wind sensing, and inter-robot relative positioning.
Moorebot
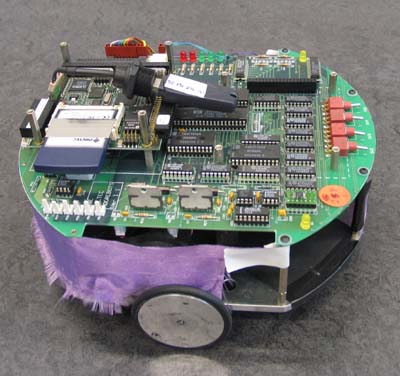
The SWIS Group has 4 Moorebots (also known as Linuxbots), a platform designed at the University of the West of England, Bristol. These robots have a diameter of 24 cm and are equipped with a PC/104 stack. The Moorebots have been upgraded from their original configuration by adding a belt of accurate infrared distance sensors and installing an Arcom Viper board with a low-power 400 MHz Intel PXA255 XScale processor, with IEEE 802.11 wireless provided by a CompactFlash card. While these robots have been used for extensive research in the past (e.g., experimentation using on-board inter-robot relative positioning), they are not currently being used for any on-going research project.