DISAL offers a range of student projects in its three main areas of expertise: Distributed Robotic Systems, Sensor and Actuator Networks, and Intelligent Vehicles. For more information about supervision guidelines and different types of student projects, please refer to this page.
>>> To apply for a project, please email the listed contact(s) and join your resume and transcript of records (Bachelor and Master if available) <<<
Spring Semester 2024-2025
Benchmarking a Multi-Robot System Composed of Flying Quadrotors for the Coverage of Known Assets
Assigned to: Francesco Scatigno

Rotary-wing Micro Aerial Vehicles (MAVs) can play a key role in the context of inspection. Such tasks often require the deployment of expensive tools and equipment to inspect infrastructural assets, such as buildings, bridges, transmission towers, etc., often implying costly downtime periods, on top of the inspection costs themselves. Single remotely operated drones are already employed in several cases to ease access to such structures and provide detailed information at a minimal cost. However, the size of such infrastructures can be prohibitive or intractable for a single robot, which is why it is natural to consider the inspection problem with a team of autonomous flying robots.
In this project, the aim is to quantitatively benchmark a solution previously proposed by our lab, that implements a partly centralized and distributed architecture for the coverage of a known asset by a team of Micro Aerial Vehicles [1]. This method must be compared against other existing coverage strategies, such as Next-Best-View (NBV) [2] and/or Frontier [3] based methods. A computational analysis was performed to compare [1] and [2] but quantitative results are lacking. A comparison to other classical approaches would be valuable as well (e.g., Frontiers). The student will work in simulation using Webots [4], where a simulation with multiple robots is already provided, along with a ROS interface.
Recommended type of project: semester project / master projects
Work breakdown: 20% theory, 80% coding
Prerequisites: Broad interest in robotics; excellent programming skills (Python, C/C++); good knowledge in ROS, git.
Keywords: Quadrotors, drones, Micro Aerial Vehicles, multi-robot system, coordination, coverage.
Contact: Lucas Wälti
References:
[1] L. Wälti, I. Kagan Erunsal and A. Martinoli, “Multi-Robot Online Coverage with a Team of Resource-Constrained Micro Aerial Vehicles”, 2024 Distributed Autonomous Robotic Systems (DARS), New York, USA, 2024. https://infoscience.epfl.ch/entities/publication/3336a4cc-d140-4d29-b6d0-ef4d43278736
[2] Bircher, Andreas, Mina Kamel, Kostas Alexis, Helen Oleynikova, and Roland Siegwart. “Receding Horizon ‘Next-Best-View’ Planner for 3D Exploration.” In 2016 IEEE International Conference on Robotics and Automation (ICRA), 1462–68. Stockholm, Sweden: IEEE, 2016. https://doi.org/10.1109/ICRA.2016.7487281.
[3] Cieslewski, Titus, Elia Kaufmann, and Davide Scaramuzza. “Rapid Exploration with Multi-Rotors: A Frontier Selection Method for High Speed Flight.” In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2135–42. Vancouver, BC: IEEE, 2017. https://doi.org/10.1109/IROS.2017.8206030.
[4] “Webots: Robot Simulator.” Accessed October 6, 2022. https://cyberbotics.com/.
Safe Navigation in Environments Represented by a Gaussian Mixture Model
Assigned to: Ludovic Pujol

Image source: https://sites.google.com/stanford.edu/splat-nav [3]
There has been recently a lot of attention given to Gaussian Splats [1]. This technique allows high quality view generations using a mixture of Gaussians, learned from training images and known camera poses, using differential rendering. Although this technique was initially developed and intended for the Computer Graphics community, the robotics community has recently explored ways of leveraging this representation for mobile robots. Simultaneous Localization and Mapping (SLAM) [2] and safe navigation [3] with such environment representation have already been studied. However, previous work using coarser mixtures of Gaussians exists [4,5] as well. Various strategies have been explored for navigation in such representation [3,6,7] with various drawbacks and advantages.
This project aims at studying how to navigate in environments represented as a Mixture of Gaussians (MoG). Various approaches exist, such as motion primitives, local discretization as voxel grid, safe corridors generation (polytopes) or Control Barrier Functions (CBFs). This project should therefore cover and provide an understanding of the different approaches encountered in the literature, as well as implement one or several solution(s) for path planning. The work will be carried out in simulation in the Webots simulator [8], using realistic drone simulations. Several synthetic environments and Gaussian representations will be generated to test and evaluate the selected implemented approach(es).
Recommended type of project: semester project / master project
Work breakdown: 50% theory, 30% coding, 20% simulation
Prerequisites: Broad interest in robotics; excellent programming skills (Python, C/C++); good knowledge in ROS, git.
Keywords: Micro Aerial Vehicles, simulation, Gaussian Splats, Gaussian Mixture Models, Mixture of Gaussians.
Contact: Lucas Wälti
References:
[1] Kerbl, Bernhard, Georgios Kopanas, Thomas Leimkuehler, and George Drettakis. “3D Gaussian Splatting for Real-Time Radiance Field Rendering.” ACM Trans. Graph. 42, no. 4 (July 26, 2023): 139:1-139:14. https://doi.org/10.1145/3592433.
[2] Keetha, Nikhil, Jay Karhade, Krishna Murthy Jatavallabhula, Gengshan Yang, Sebastian Scherer, Deva Ramanan, and Jonathon Luiten. “SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM.” arXiv, April 16, 2024. http://arxiv.org/abs/2312.02126.
[3] Chen, Timothy, Ola Shorinwa, Joseph Bruno, Javier Yu, Weijia Zeng, Keiko Nagami, Philip Dames, and Mac Schwager. “Splat-Nav: Safe Real-Time Robot Navigation in Gaussian Splatting Maps.” arXiv, April 26, 2024. http://arxiv.org/abs/2403.02751.
[4] Tabib, Wennie, Kshitij Goel, John Yao, Mosam Dabhi, Curtis Boirum, and Nathan Michael. “Real-Time Information-Theoretic Exploration with Gaussian Mixture Model Maps.” In Robotics: Science and Systems XV. Robotics: Science and Systems Foundation, 2019. https://doi.org/10.15607/RSS.2019.XV.061.
[5] Tabib, Wennie, Kshitij Goel, John Yao, Curtis Boirum, and Nathan Michael. “Autonomous Cave Surveying With an Aerial Robot.” IEEE Transactions on Robotics 38, no. 2 (April 2022): 1016–32. https://doi.org/10.1109/TRO.2021.3104459.
[6] Corah, Micah, Cormac O’Meadhra, Kshitij Goel, and Nathan Michael. “Communication-Efficient Planning and Mapping for Multi-Robot Exploration in Large Environments.” IEEE Robotics and Automation Letters 4, no. 2 (April 2019): 1715–21. https://doi.org/10.1109/LRA.2019.2897368.
[7] Chen, Timothy, Aiden Swann, Javier Yu, Ola Shorinwa, Riku Murai, Monroe Kennedy III, and Mac Schwager. “SAFER-Splat: A Control Barrier Function for Safe Navigation with Online Gaussian Splatting Maps.” arXiv, September 15, 2024. http://arxiv.org/abs/2409.09868.
[8] “Webots: Robot Simulator.” Accessed October 6, 2022. https://cyberbotics.com/.
Belief Sharing and Merging of a Multi-Robot System for Gas Source Localization Task
Assigned to: Marc Arias Mitjà
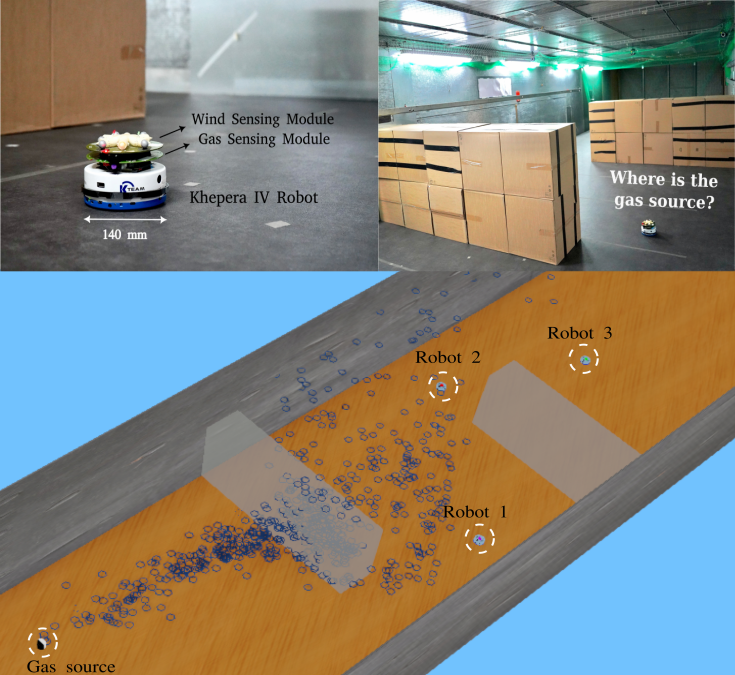
The deployment of robots for Gas Source Localization (GSL) tasks in hazardous scenarios significantly reduces risks to humans and animals, given their autonomy and sensing capability for gas and wind. Probabilistic GSL algorithms [1][2] infer the source position efficiently from scattered measurements and make informed navigation decisions. The belief of a candidate source position is updated by comparing the actual measurements and the expected concentrations derived from the gas model.
The application of Multi-Robot Systems (MRS) [3] in this field offers a promising research direction, particularly for enhancing information gathering procedures in time-critical applications. However, when employing an MRS where each robot builds a belief map of the source position based on its own measurements, the challenges of merging belief maps across robots and leveraging differences in their estimations to develop more efficient navigation strategies remain unexplored.
This project aims to investigate the deployment of MRS for GSL tasks, focusing on belief sharing and merging between robots. The proposed approach will be evaluated in the high-fidelity robotic simulator, Webots [4].
Recommended type of project: semester project, master project
Work breakdown: 40% theory, 60% simulation
Prerequisites: passion on solving issues, broad interest in robotics, good programming skill (C/C++), experience with Bayesian inference and Webots will be an asset
Keywords: gas source localization, probabilistic algorithm, multi-robot system
Contact: Wanting Jin
References:
[1] W. Jin, F. Rahbar, C. Ercolani, and A. Martinoli, “Towards Efficient Gas Leak Detection in Built Environments: Data-Driven Plume Modeling for Gas Sensing Robots,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, May 2023, pp. 7749–7755.
[2] W. Jin and A. Martinoli, “Sense in Motion with Belief Clustering: Efficient Gas Source Localization with Mobile Robots,” In 2024 IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, May 2024.
[3] J. R. Bourne, M. N. Goodell, X. He, J. A. Steiner, and K. K. Leang, “Decentralized multi-agent information-theoretic control for target estimation and localization: finding gas leaks,” The International Journal of Robotics Research, vol. 39, no. 13, pp. 1525–1548, 2020.
[4] Webots: https://cyberbotics.com/doc/reference/index.
Gas Leak Detection with Sensor Network by Using Graph Neural Networks
Assigned to: Jin Kilidjian
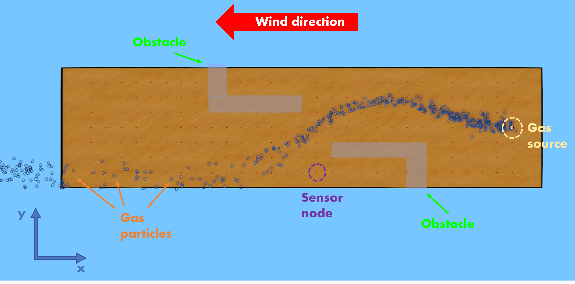 |
Gas leak detection is a critical application in industrial safety, environmental protection, and public health [1]. Traditional approaches rely on sensor networks to measure gas concentrations and identify leaks based on predefined thresholds [2]. However, these methods maybe be less effective given the sparse measurements (limited number of sensor nodes), noisy nature of the gas sensor, and dynamic environmental factors such as airflow influenced by obstacles. An effective fault detection method that evolves the spatial and temporal relationships between sensor signals across the sensor network could facilitate early-stage gas leak detection and reduce the likelihood of false alarms.
Graph Neural Networks (GNNs) [3] are well-suited for processing graph-structured data, such as sensor networks, where nodes represent sensors, and edges represent relationships of the spatial proximity of the network. By leveraging the relational structure of the sensor network, GNNs can provide more robust and accurate predictions for gas leak detection.
The project aims to develop and evaluate a GNN based approach for fault detection in the sensor network system for detecting gas leaks using data collected from a simulated or real-world sensor network.
Recommended type of project: semester project, master project
Work breakdown: 50% theory, 50% programming
Prerequisites: passion on solving issues, broad interest in data science and deep learning, good programming skill (C/C++), experience with GNN will be an asset
Keywords: graph neural networks, sensor networks, gas leak detection
Contact: Wanting Jin
References:
[1] W. Jin, F. Rahbar, C. Ercolani, and A. Martinoli, “Towards Efficient Gas Leak Detection in Built Environments: Data-Driven Plume Modeling for Gas Sensing Robots,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, May 2023, pp. 7749–7755.
[2] Burgués, Javier, et al. “Gas distribution mapping and source localization using a 3D grid of metal oxide semiconductor sensors.” Sensors and Actuators B: Chemical 304 (2020): 127309.
[3] M. Zhao and O. Fink, “DyEdgeGAT: Dynamic Edge via Graph Attention for Early Fault Detection in IoT Systems,” in IEEE Internet of Things Journal, vol. 11, no. 13, pp. 22950-22965, July, 2024
Optimizing Gas Sensor Placement on Micro Drones via CFD and Wind Tunnel Experiments
Assigned to: Thomas Cirillo
 |
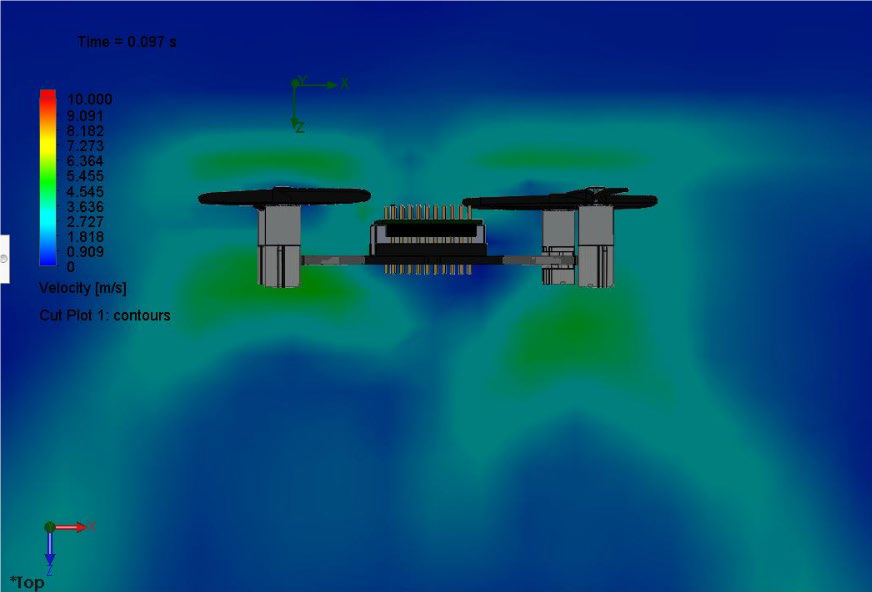 |
Detecting the source of a dangerous gas is very useful for environmental monitoring and for taking fast and effective countermeasures in case of an emergency. Multi-rotor drones are becoming increasingly popular for performing this task. However, the propeller rotation inside the gas plume can compromise gas sensor readings. Therefore, an appropriate mechanical design and gas sensor configuration are essential to minimize the adverse effects of airflow on the gas sensor [1].
In a previous semester project [2], a Computational Fluid Dynamics (CFD) simulation of the gas flow in the vicinity of Crazyflie [3] nano drone was conducted using OpenFOAM [4] and Solidworks [5] to reveal the flow’s properties. Such effort needed to be complemented by experimental work to decide on the gas sensor placement [6].
In this project, taking the previous work [2], [6] as a baseline, we aim to experimentally validate the result of the CFD simulation for the Crazyflie in wind tunnel experiments further and leverage this expertise to iteratively refine the mechanical design and sensor configuration, primarily leveraging CFD tools, for the larger micro drone Starling [7], which shows significantly better autonomy and payload capacity than the Crazyflie nano drone.
Recommended type of project: semester project/master project
Work breakdown: 20% theory, 30% coding, 50% simulation and physical experiments
Prerequisites: Broad interest in robotics, good programming skills (C/C++ and/or Matlab), an introductory knowledge or interest in learning fluid dynamics, and a background in CFD will be an asset
Keywords: CFD simulations, quadrotors, gas sensing, mechanical design
Contact: İzzet Kağan Erünsal and Nicolaj Schmid
References:
[1] S.R. Weerasinghe and M. Monasor, “Simulation and Experimental Analysis of Hovering and Flight of a Quadrotor”, 13th International Conference on Heat Transfer, Fluid Mechanics, and Thermodynamics, 2017
[2] A. Moufidi, “Validation of a High-Fidelity Simulator for Odor Sensing with a Quadrotor”, Semester project, DISAL, 2020[3] https://www.bitcraze.io/products/old-products/crazyflie-2-0/, accessed in June 2024
[4] https://www.openfoam.com/, OpenFOAM, accessed in June 2024
[5] https://www.solidworks.com/, Solidworks, accessed in June 2024
[6] Ercolani C. and Martinoli A., “3D Odor Source Localization using a Micro Aerial Vehicle: System Design and Performance Evaluation”, Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, October 2020, Las Vegas, NV, USA, online organization, pp. 6194-6200.
[7] https://www.modalai.com/products/starling-v1, ModalAI, accessed in June 2024
Gas Source Localization using Neural Networks
Assigned to: Jad Benabdelkader
 |
 |
Gas Source Localization (GSL) aims to locate gas leaks as efficiently as possible. This is important in emergency situations involving toxic gases or to reduce the environmental impact of industrial gas leaks. Gas sources can be localized using static sensor networks or mobile robots. Many state-of-the-art methods rely on probabilistic algorithms that estimate the likelihood of the source position, e.g. Source Term Estimation (STE) [1, 2]. However, most of these methods assume an explicit model of the gas plume/distribution, which is a very complicated fluid dynamic phenomenon. Typically, this assumption fails in cluttered environments. In this project, we aim to estimate the position of the gas source directly using an Artificial Neural Network (ANN).
We want to train an ANN with gas maps (input) and predict the location of gas sources (output). Previous methods first map the entire environment and then predict the source location [3, 4]. However, we consider a mobile robot that takes continuous measurements and relies on intermediate predictions. Therefore, the model should work with incomplete input maps, i.e. before the robot has explored the whole environment. Previously, our lab has used deep learning in the context of STE [2]. Hence, we have already collected a significant amount of data in simulation that can be used for training.
Recommended type of project: semester project
Work breakdown: 20% theory, 80% coding
Prerequisites: An interest in machine learning and robotic systems. Strong background in Python and Pytorch. Previous experience in training of neural networks.
Keywords: Machine Learning, Neural Network, Gas Source Localization
Contact: Nicolaj Schmid
References:
[1] M. Hutchinson, H. Oh, and W.-H. Chen, “A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors,” Information Fusion, vol. 36, pp. 130–148, Jul. 2017.
[2] W. Jin, F. Rahbar, C. Ercolani, and A. Martinoli, “Towards Efficient Gas Leak Detection in Built Environments: Data-Driven Plume Modeling for Gas Sensing Robots,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), London, United Kingdom: IEEE, May 2023, pp. 7749–7755.
[3] A. S. A. Yeon, A. Zakaria, S. M. M. S. Zakaria, R. Visvanathan, K. Kamarudin, and L. M. Kamarudin, “Gas Source Localization via Mobile Robot with Gas Distribution Mapping and Deep Neural Network,” in 2022 2nd International Conference on Electronic and Electrical Engineering and Intelligent System (ICE3IS), Yogyakarta, Indonesia: IEEE, Nov. 2022, pp. 120–124.
[4] Z. H. M. Juffry et al., “Deep Neural Network for Localizing Gas Source Based on Gas Distribution Map,” in Proceedings of the 6th International Conference on Electrical, Control and Computer Engineering, vol. 842, Z. Md. Zain, Mohd. H. Sulaiman, A. I. Mohamed, Mohd. S. Bakar, and Mohd. S. Ramli, Eds., in Lecture Notes in Electrical Engineering, vol. 842. , Singapore: Springer Singapore, 2022, pp. 1105–1115.
Drag Model Identification and Wind Prediction with “Off-The-Shelf” Drones
Assigned to: Badil Mujovi
 |
 |
Rotary-wing unmanned and Micro Aerial Vehicles (UAVs and MAVs) are gaining popularity for environmental monitoring. Especially, wind sensing is an application that can benefit from such platforms as a flying robot can be deployed easily and report on the local wind conditions in an area of interest. Common approaches consist in fitting the rotary-wing UAV with dedicated sensors, which often need to extend far beyond the robot’s body to avoid the downwash from the propellers. This drastically increases the footprint of the aircraft and requires dedicated hardware to be mounted on the robot, reducing its payload capacity for other tasks, even more so for MAVs. Recent work in our lab consisted in developing a method for drag model identification and external force detection for rotary-wing MAVs that does not require any dedicated sensor. We could show that external forces can be sensed in any direction, while only relying on commonly available onboard sensors and information (accelerometer, pose estimate, throttle command), without requiring any dedicated hardware.
The goal of this project is therefore to verify whether the approach mentioned above and presented in [1] allows us to detect the wind speed around an MAV by inverting its identified drag model. The first step of the project will consist in developing a flight data acquisition process for the Crazyflie drone [2], identifying the drag parameters of the Crazyflie drone leveraging the collected flight data, obtained during dynamical flights performed in no-wind conditions. The second step will consist in measuring wind intensity while flying in a wind tunnel with controlled wind conditions. The student will be assisted in recording flight data but will also be able to participate in the acquisition of experimental data with flying robots according to the needs of the project.
Recommended type of project: semester project
Work breakdown: 20% theory, 50% coding, 30% real-world experiments
Prerequisites: Broad interest in robotics; good programming skills (Python, C/C++); knowledge in ROS.
Keywords: Quadrotors, drones, Micro Aerial Vehicles, Crazyflie, drag model, wind sensing.
Contact: Nicolaj Schmid and Lucas Wälti
References:
[1] L. Wälti and A. Martinoli, “Lumped Drag Model Identification and Real-Time External Force Detection for Rotary-Wing Micro Aerial Vehicles,” 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 3853-3860, doi: 10.1109/ICRA57147.2024.10610862.
[2] Giernacki, Wojciech, Mateusz Skwierczyński, Wojciech Witwicki, Paweł Wroński, and Piotr Kozierski. “Crazyflie 2.0 Quadrotor as a Platform for Research and Education in Robotics and Control Engineering.” In 2017 22nd International Conference on Methods and Models in Automation and Robotics (MMAR), 37–42, 2017. https://doi.org/10.1109/MMAR.2017.8046794.
Autumn Semester 2025-2026
Projects for the autumn semester will be announced around May 2025.