RESEARCH DATA
|
Status: Completed (2019-2023) PhD Student: Nicolas Rogeau, M.Sc. engineer-architect, IBOIS Thesis director: Prof. Yves Weinand, architect and engineer, IBOIS Thesis co-director: Prof. Pierre Latteur, structural engineer, UCLouvain |
RESEARCH ABSTRACT

The digitization of timber construction, the emergence of engineered wood products, and the urgent need to drastically reduce buildings’ environmental impact have given a rebirth to wood as a construction material. On the one hand, increasing the use of timber in building technology has the potential to transform cities into carbon sinks. On the other hand, the growing availability of Computer Numerical Control (CNC) machines and industrial robotic arms makes woodworking less labor-intensive, less time-consuming, and thus more cost-effective. Besides, recent advances in Computer-Aided Design and Manufacturing (CAD/CAM) have paved the way for a wide range of architectural and structural design possibilities by overcoming this organic material’s inherent limitations.
It is within this context that a significant focus has been put on Integrally-Attached Timber Plate Structures (IATPS) at the Laboratory for Timber Constructions (IBOIS, EPFL) since the last decade. This innovative yet sustainable construction system combines traditional craft with state-of-the-art technology. Timber panels are cut with a CNC and connected with timber joints inspired by ancient woodworking techniques to create spatial structures that can reach up to 50 m without glue or screws. A significant asset lies in the possibility of building both standard and bespoke buildings from simple flat-packed panels whose pre-cut shape informs the assembly. While previous research has focused on the computational design and digital fabrication of IATPS, this thesis has, for the first time, investigated the automation of the assembly process. The objective was to determine the feasibility of assembling these structures with a robotic arm and to identify the influence of assembly constraints on the design.
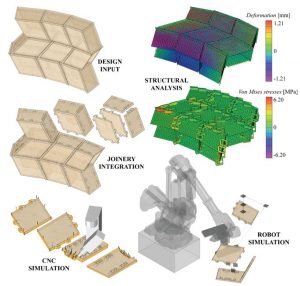
The methodology adopted a multidisciplinary approach integrating architectural, civil engineering, robotics, and computer science considerations. First, a computational framework was developed to enable a streamlined workflow from architectural design to robotic construction. This included the parametrization of timber joints, the implementation of algorithms to address modular assembly sequences, and a collaboration with an industrial partner to simulate robot trajectories within the design interface. Second, full-scale experiments were carried out with a 6-axis industrial robotic arm to assess and tackle the challenges associated with the robotic insertion of timber panels. A feedback loop relying on computer vision was developed to improve the robot’s accuracy. In addition, design guidelines were established to determine an optimal shape for timber joints to reduce friction forces during insertion.
A key achievement of the thesis is to have made IATPS more accessible to the Architecture, Engineering, and Construction (AEC) community through the release of Manis, an open-source Grasshopper plugin. This integrated design tool automates the 3D modeling of timber joints, the generation of CNC cutting files and robot instructions, as well as the creation of Finite Element meshes for subsequent structural analysis. Furthermore, the thesis gives new perspectives on mass timber construction by providing a framework for the industrial implementation of wood-wood connections in automated prefabrication lines. It proposes an innovative assembly process that requires no mechanical fasteners or chemical bonding and is fully automated from design to construction.