If you don’t see a project that interests you below, you can contact Prof. Olga Fink at olga.fink@epfl.ch to ask about possible master thesis or semester project opportunities in the lab. We are happy to hear from motivated students who want to help advance research in intelligent maintenance systems.
Open project and master thesis opportunities for students:
Physics-Informed and Graph Neural Networks
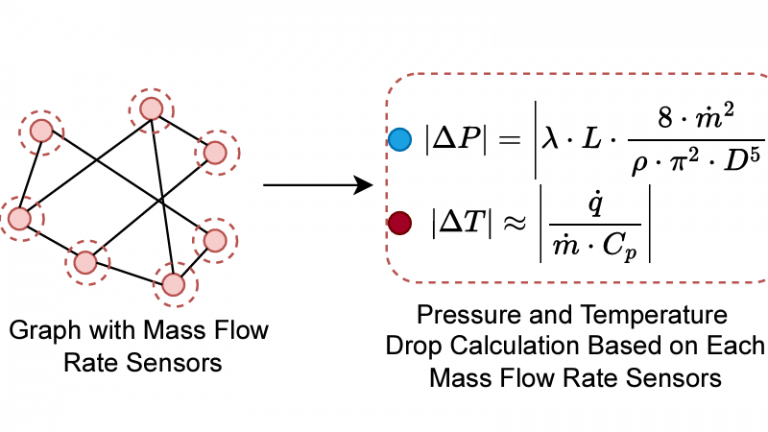
The Industrial Internet of Things (IIoT) generates vast quantities of data from interconnected sensors and devices. To utilize the full potential of this data, it’s essential to go beyond individual sensor readings and understand the complex relationships between them. These relationships can be diverse: sensors may monitor specific equipment, while actuators directly control or operate parts of a process. Graph Neural Networks (GNNs) are powerful tools to model complex sensor networks, leveraging relationship information typically lost in traditional machine learning approaches. Analyzing IIoT data without considering sensor relationships can lead to missed insights and suboptimal decision-making. By inferring a graph structure from an IIoT sensor network, we create a structure capable of representing these relationships. GNNs, by learning directly from this graph, can model and distinguish between different relationship types (“monitors,” “operates,” etc.), leading to more accurate and interpretable predictions, fault/anomaly detections, and diagnostics. This thesis aims to bridge this gap, developing methods to capture sensor relationships and leverage GNNs for their analysis.
You can apply via SiROP or directly contact Mengjie Zhao.
In this project, the student will attempt to embed relevant physics priors in graph neural networks (GNNs) with the goal of developing an inverse modeling framework for the prediction of the underlying material model of a system, given the labeled input (load/excitation) and the output (mechanical response) data.
Keywords: Graph neural networks, Physics prior, finite element method
You can apply via SiROP or directly contact Vinay Sharma.
Symbolic regression is a set of methods designed to discover symbolic, human-readable formulas that best fit a given dataset. It is a powerful tool for model discovery, enabling the identification of underlying patterns or dynamics in an unknown system. Modern symbolic regression methods are highly applicable to fundamental science. The outcomes of symbolic regression methods are the models can take the form of algebraic expressions as well as differential equations. However, non-linear symbolic regression methods often face significant challenges, including convergence to local minima and enforcing the sparsity in the resulting expression coefficients. Addressing these issues is crucial to improving the interpretability and robustness of the derived models. In this project, the student will have the opportunity to work on enhancing optimization strategies for previously proposed non-linear symbolic regression methods. This project could serve as an excellent entry point into the fields of symbolic regression and model discovery, with broad applications in advancing fundamental scientific understanding.
[1] Makke, N., & Chawla, S. (2024). Interpretable scientific discovery with symbolic regression: a review. Artificial Intelligence Review, 57(1), 2.
[2] Sahoo, S., Lampert, C., & Martius, G. (2018, July). Learning equations for extrapolation and control. In International Conference on Machine Learning (pp. 4442-4450). Pmlr.
You can apply by directly contacting Sergei Garmaev.
Machine Learning for Industrial and Engineering Applications
Time-series data is increasingly prevalent across various domains, including finance, healthcare, and environmental monitoring. The ability to extract meaningful information from time-series data is crucial for prediction, classification, and anomaly detection. This project focuses on exploring different time-series representations and their impact on machine-learning tasks.
Objectives
-
Benchmarking Time-Series Representations: Investigate the performance of various time-series representations including Fast Fourier Transform (FFT), Recurrence Plot (RP), Gramian Angular Field (GAF), and Markov Transition Field (MTF) in the context of machine learning tasks.
-
Design of Fusion Method: Develop a novel method to fuse information from these representations, aiming to leverage their combined strengths.
-
Evaluation on Diverse Datasets: Assess the effectiveness of the proposed method on a variety of datasets pertaining to Time-Series Classification, Forecasting, and Anomaly Detection.
Methodology
-
Literature Review: Conduct a comprehensive review of existing literature on time-series representation methods and their applications.
-
Implementation of Representations: Implement and fine-tune FFT, RP, GAF, and MTF, ensuring a fair and consistent basis for comparison.
-
Benchmarking: Evaluate each representation method across multiple datasets, using standard metrics relevant to classification, forecasting, and anomaly detection.
-
Fusion Method Development: Design a fusion algorithm to integrate the different representations, potentially using techniques like feature concatenation, ensemble methods, or deep learning architectures.
-
Experimental Evaluation: Test the fusion method across the same datasets used for benchmarking, comparing its performance against the individual representation methods.
You can apply via SiROP or directly contact Hao Dong.
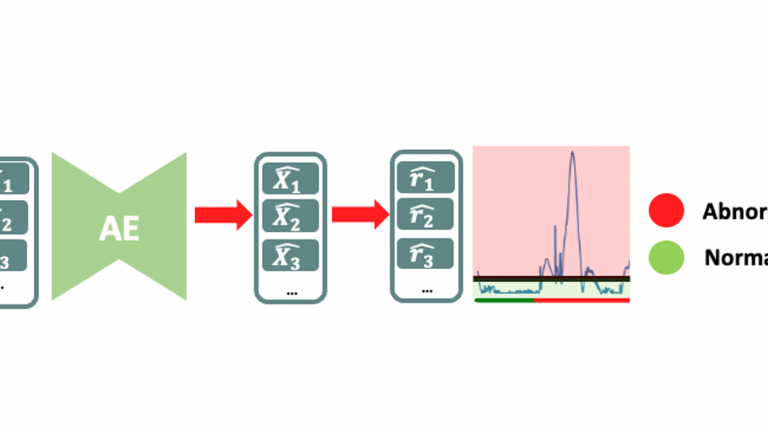
Denoising Diffusion Probabilistic Models (DDPMs) are a highly popular class of deep generative models that have been successfully applied to various problems, including image and video generation. Recently, there have been attempts to apply these models to time-series data. However, they are not enough for modeling spatial-temporal interactions. They primarily focus on temporal dependencies within individual sensors, neglecting the spatial correlations between different nodes. In reality, objects are spatially correlated with each other. This project aims to explore a graph-based denoising diffusion probabilistic model to jointly capture both temporal dependencies and spatial interactions.
- This project seeks to merge the capabilities of DDPM with Spatial-Temporal Graph Neural Networks, potentially unlocking new possibilities for academic research and practical applications in the Industrial Internet of Things (IIoT). The objectives of this project include:
- Develop a graph-based denoising diffusion probabilistic model that effectively captures both temporal dependencies and spatial interactions in IIoT data.
- Conduct comprehensive experiments to compare the performance (e.g., forecasting, imputation, etc.) of the proposed model against existing state-of-the-art methods.
You can apply via SiROP or directly contact Keivan Faghih.
Computer Vision and Multimodal Learning Applications
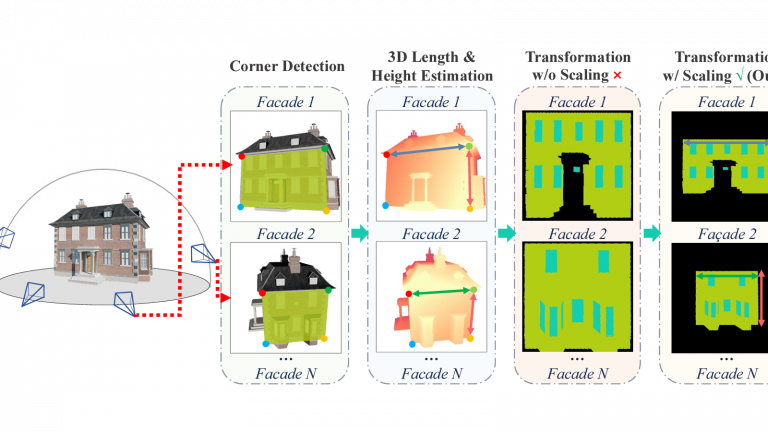
Thermal cameras have grown increasingly popular due to their competitive pricing, robustness in adverse weather, and the unique modality of capturing surface thermal distributions. These techniques have been widely applied in robust object detection and tracking, infrastructure diagnostics, and large-scale urban analysis. This project will explore the integration of thermal imaging with cutting-edge 3D reconstruction methods. The student will develop techniques to incorporate thermal images into 3D models, enabling the visualization of high-fidelity thermal distributions across diverse objects and scenes.
You can apply via SiROP or directly contact Chenghao Xu.
In this project, you will focus on the task of learning/simulating rigid objects dynamics from videos, with the end-goal of predicting future or alternative trajectories for the objects in the scene. This task includes the decomposition of a visual scene into multiple blocks (identifying individual objects), the modeling of their evolution and interactions in the scene (positions, velocities, collisions, …), and the prediction of future (or alternative) trajectories (also called rollout).
Keywords: Computer Vision, Mechanics, Scene Understanding, Object-centric Learning
You can apply via IS-Academia – project #14080 or directly contact Amaury Wei.
Most deep models are trained under a close-world assumption and hence do not possess knowledge of what they do not know, leading to over-confident and inaccurate predictions for unknown objects. Out-of-distribution (OOD) detection, which aims to identify unknown objects, has attracted much attention as it plays a vital role in a variety of applications such as industrial inspection, medical diagnosis, and autonomous driving. One of the primary challenges of effective OOD lies in the wide-existing domain shift in the real world. The testing dataset might have a significant distribution from the training data of deep learning models. Thus, it is even more difficult for the model to distinguish between the domain difference and the OOD objects. In this task, the student is expected to work on the OOD detection task with domain shift. Specifically, we focus on test-time domain adaptation, which focuses on OOD detection during inference time online. The potential application case can be found here: https://www.epfl.ch/labs/cvlab/data/road-anomaly/. Overall, the goal of this project is to improve the OOD performance on new domains through the use of test-time domain adaptation techniques. The student is expected to undertake the following tasks in this project: – explore current test-time domain adaptation methods – improve those methods and modify them for OOD detection.
You can apply via SiROP or directly contact Han Sun.
Internship
No internship for the moment.