INSTRUCTIONS FOR MASTER AND SEMESTER PROJECTS
Please find below the links towards the instructions for the master or semester projects.
Note : the registration to the Instant-Lab secretary has to be done 3 weeks prior to the semester beginning
and the model sheet for the project resume
All the student projects of the section SGM are available in this link
Instant-Lab available projects:
Surgical knot tension measurement device
A previous study [1], led by the EPFL fleXLab, in collaboration with plastic surgeon Samia Guerid, examined the mechanical strength of surgical knots and how multiple factors such as pretension, friction, and the number of throws influence their performance. The plastic deformation of the surgical filaments tied by the surgeons ensure its knot strength and shape. The results showed that the tension applied during knot tying procedure (pretension) permanently deforms the filament, creating a holding force. Insufficient pretension can cause the knot to untie, while excessive tension may break the filament.
By analyzing numerous knots tied by the surgeon, the results showed that the surgeons are capable of tying systematically safe knots by consistently setting a pretension in the functional range. However, mastering this safe range typically requires years of experience for surgeons. Besides, actual evaluation methods to assess the security of knots are based on visual observation and manual haptic feedback. Taking advantage of the acquired understanding of knot strength, the goal of this project is to design a device that can be integrated into training and evaluation programs for surgeons. 
[1] (https://www.science.org/doi/10.1126/sciadv.adg8861)
The project consists of:
- Literature + Mechanical Design Review: Conduct a comprehensive review of existing research on the strength and mechanics of surgical knots. Evaluate and discuss existing designs of force measurement tools.
- Tool Design and Prototyping: Improve (or invent) and prototype a mechanical system capable of measuring the force exerted during knot tying. The tool that can be handheld by the surgeon (similar to a dynamometer key) or attached to a table.
- (Force Limitation System): Develop a tunable system that can limit force (or torque) to help regulate knot tension.
- (Ergonomic Design): Incorporate ergonomic principles into the tool design, ensuring user comfort and simplicity of use.
- (Validate Prototype Performance): Test the prototype with different types of filaments and knots to measure its accuracy and reliability in capturing pretension forces.
Required background:
- Interest in mechanical design, robotics, and their applications in medicine.
- Interest in flexure mechanisms (commonly used in the design of micro-tools and comonly used in the laboratory).
- Interest in prototyping using laser cutters, 3D printers or any other means.
- CAD drawing, interest in FEM simulations
Expected deliverables:
- Final report
- Two oral presentations (mid and end of semester)
- Mechanism design, 3D files
- Manufactured prototype
This project can be carried out either as part of a semester project or as part of a master’s thesis. The tasks and deliverables will be adjusted according to the project’s duration.
Location: EPFL Associated campus of Neuchâtel
Sections: SGM or other interested
Contact email: celestin.vallat@epfl.ch; javier.sabater@epfl.ch
Damping Compliant Mechanisms with Viscoelastic Material

Compliant mechanisms are the modern solution for avoiding wear, backlash and lubrication. These are essential features for precision mechanisms in space, from the precise positioning of optical devices to the orientation of satellite thrusters. One of the disadvantages of these compliant mechanisms is their high quality factor: due to the absence of friction, unwanted vibrations are not damped and can last for a very long time.
CSEM, a recognized specialist in compliant mechanisms for space, is studying ways of remedying this disadvantage. The idea is to add a viscoelastic material to the compliant metal mechanism to improve damping. An initial project has shown promising results, but many questions remain to understand the interactions between the viscoelastic material and the compliant mechanism.
Project consists of:
- Correlation of an existing FEM model with past and upcoming measurements
- Qualitatively understanding of the viscoelastic damping phenomena
- Optimization of the existing sandwich blade design to enhance damping
- Development a simplified analytical model for sizing of such blade
Required background:
- Mechanical design
Project type: Master’s project
Location: CSEM, Neuchâtel
Section: SGM or other interested
Contact email: florent.cosandier@epfl.ch
Biomimetic Mechanical Sound Generation 
The goal of this project is to design a new type of biomimetic sound producing mechanism inspired by the stridulation of crickets. The well known sound chirping of crickets is very pure in tone, loud, consumes very little energy and is low volume. Several applications like mechanical watch alarms or musical instruments can be imagined.
Project consists of:
Two subjects depending on student background:
- Mechanical design and manufacturing of a prototype (Sections: MT, ME)
- Physical modelling of the stridulation principle in crickets (Sections: MT, ME, MA, PH)
Location: EPFL Associated campus of Neuchâtel
Contact email: simon.precheur-llarena@epfl.ch
Flexure based surgical tool
Growing life expectancy goes together with improvement of healthcare. New threatment methods are becoming less invasive, allowing for shorter recovery time. Following this trend we would like to propose a new micro-surgical tool.
Project will focus on development of flexible structure for flexture based surgical tool. It will allow for 2DoF of rotations. End effector integrated in such flexure will be a gripper, or other depending on medical application.
Whole structure should be open for either manual or robotic actuation.
Required background :
- Mechanical design
Location : EPFL Associated campus of Neuchâtel
Sections : SGM or other interested
Contact email : charles.baur@epfl.ch
Design of a flexure-based hexapod robot for positioning a 1.5-ton cryostat (Already taken)
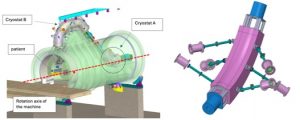
In partnership with CERN, EPFL INSTANT-LAB is participating in the development of new medical systems for particle beam treatment of patients with different types of cancers. The proposed study aims to design a support system for the cold mass of a superconducting magnet inside a mobile cryostat cooled down to 4 K. One of the innovative aspects is the use of a mobile transfer line composed of superconducting magnets.
Project consists of:
- Propose a hexapod type robotic architecture (Stewart platform) in order to move the 1500 kg cryostat.
- Study a solution based on flexible elements for the joints at both ends of each leg of the hexapod.
- Use a numerical tool for the evaluation of the direct and inverse kinematics of the 6-leg system.
- Asses the impact of the cryogenic temperature on the system.
Required background:
- Kinematic design
- Mechanical design
Location: EPFL Associated campus of Neuchâtel
Section: SGM or other interested
Contact email: florent.cosandier@epfl.ch
Flexure-based pick-and-place robot (Already taken)
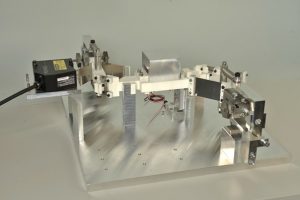 The goal of this project, in collaboration with Mikron, is to actuate and control a new type of 2-DoF flexure-based pick-and-place robot close to its eigenfrequency. The flexure-based implementation, in addition to the voice coil actuation, allows for energy-efficient trajectory planning strategies.
The goal of this project, in collaboration with Mikron, is to actuate and control a new type of 2-DoF flexure-based pick-and-place robot close to its eigenfrequency. The flexure-based implementation, in addition to the voice coil actuation, allows for energy-efficient trajectory planning strategies.
The project consists of:
- Familiarizing yourself with the TI LAUNCHXL-F28379D Development kit.
- Control the 2-DoF pick-and-place robot close to its eigenfrequency.
- Realizing a pick-and-place operation with an electromagnet attached to the end-effector.
Required background:
- Control
- Mechanical design
Location: EPFL Associated campus of Neuchâtel
Sections: SGM or other interested
Contact email: hubert.schneegans@epfl.ch