B053——————————————————————————-
 Efficient temperature and pressure control for professional coffee machines
Efficient temperature and pressure control for professional coffee machines
To have the best possible coffee in your cup, not only do the coffee beans need to have the right taste and quality, but the process to extract the different flavors must also be under tight control. Water temperature and pressure are two important parameters that need to be controlled in a coffee machine to get the right taste. These two parameters can also have a big impact on energy consumption depending on the technology used to control them. Professional coffee machines being a key market for Parker Hannifin, we want to help our customers improve their coffee-drinking experience!
The goal of the project is to develop an environmentally friendly and efficient control system for the next generation of coffee machines. After a characterization of the system components (proportional valve, heater, sensors), a strategy for the accurate control of both temperature and pressure will be elaborated. The student will analyze the process, identify an input-output model, develop an appropriate control strategy, as well as implement and validate the control software on a prototype coffee machine. The performance of the new system will be benchmarked with respect to existing technologies.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Julien Billeter
Student: Matteo Keller
L046——————————————————————————-
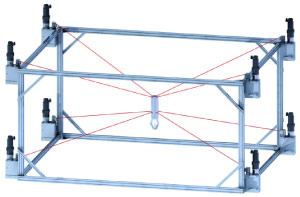
Control of cable-driven robots
A cable-driven robot is a robot manipulator driven by a set of cables. To actuate each degree of freedom a minimum of two cables are required. Thus, the system is highly over-actuated. There exist two types of systems. Suspended manipulators where the manipulator is a suspended platform is a network of cables and non-suspended manipulators which have un-actuated mechanical links between the manipulator and base. The advantage of such systems is the high degree of over-actuation. However, cables can only pull and this can severely restrict the system’s workspace.
The goal of this project is to model a non-suspended manipulator, analyse the wrench feasibility workspace and propose a control strategy.
Professor : Roland Longchamp
Type of project: Semester
Contact: David Ingram
Student: Philemon Jaermann
L044——————————————————————————
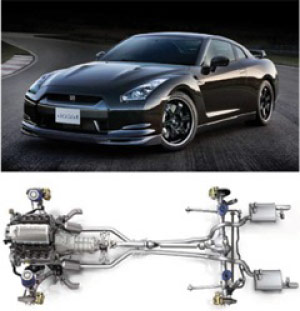
Modeling sports vehicle dynamics
The NISSAN GTR is a sports car which on paper has lower performance than most of its competitors such as the Jaguar XKR S, Porsche 911, etc… However, because of the electronic control systems it uses to manage the different parts of the car, (motor, gear box, suspension, breaks, etc…) it is able to beat it’s competitor on almost every level. It’s launch control system allows it to go from 0 to 100 km/h in 3 seconds. Its suspension management system allows it to go through corners at higher speeds. Thus, the NISSAN GTR really shows the advantages of using control to optimize the performance of a car.
The aim of this project will be to model a car in the general sense using the MATLAB/SIMULINK environment. Once a model is available, the performance of the car it to be analyzed and finally controlled.
Professor : Roland Longchamp
Type of project: Semester
Contact: David Ingram
Students: Arthur Vial and Michel Cyril Torbeymeouchi
K030——————————————————————————
 Gain-scheduled controller design for a magnetic levitation system
Gain-scheduled controller design for a magnetic levitation system
The magnetic levitation system considered in this project is nonlinear and open-loop unstable. It consists of a coil providing the magnetic force and a metal ball which is to be levitated. The position of the ball is measured with a distance sensor (laser system).
The force of the magnetic field depends on the distance from the coil in a nonlinear manner, and this is the main source of nonlinearity in the system. The aim of this project is to design a controller for the problem of tracking different reference signals (square wave, sinusoidal, triangular). In the previous project, a gain-scheduled model and controller for sinusoidal reference tracking were built. In the first phase, some additional gain-scheduled controllers will be designed and tested on the real system. Next, a Linear Parameter Varying (LPV) model should be identified and used for the LPV controller design. Control system should be robust against the measurement noise, and possibly, against the lateral disturbances. Existing LabView application should be upgraded so that designed controllers can be tested in real-time experiments.
MER: Alireza Karimi
Type of project: Semester
Contact: Zlatko Emedji
Student: John Ingram
J014————————————————————————–
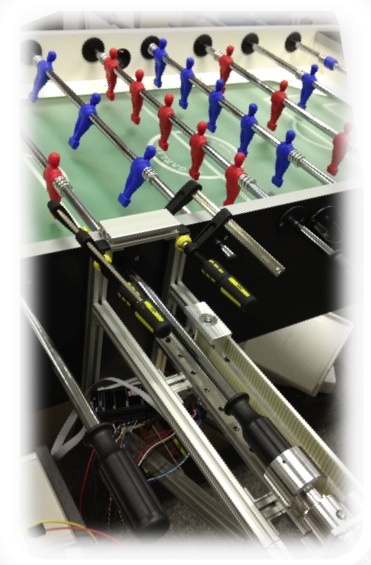 Control system for babyfoot
Control system for babyfoot
The LA’s babyfoot has been modified to replace one human player by an mechanical “arm”. There are different projects defined in this context as follows:
Control algorithm:
The aims of this project is to improve the existing control of the bar that holds the players. The control strategy should use the ball measurements and implement first a solution that is able to reliably stop the ball, then design the control strategy that is able to shoot in the opponent’s goal. Finally design a simple strategy to pass the ball among players of the same team but in different bar.
Student: Cyril Picard
Ball positioning via Laser:
The aims of this project is to design a new position measurement system (hardware and software) for the babyfoot. This system relies on laser measurements to derive the ball position. The proposed hardware should be interfaced by the existing DAQ board (voltage input). The measurements precision should be in accordance with the requirements for the control part.
Student : Luca Brusatin
Opponent positions measurements :
The aims of this project is to design a system to measure the opponents positions (x and theta for all bars). This system should not be too invasive so that opponents players can be humans. The measurements precision should be in accordance with the requirement for the control part. Various solutions could be evaluated, the most promising one will be implemented in at least 1 opponent bar.
Student : Vasco Foletti
Vision via camera :
The aims of this project is to improve the existing vision solution (precision, speed, delay) to measure the ball position. The proposed solution should be integrated into LabVIEW and be directly accessible by the control part. The measurements precision should be in accordance with the requirement for the control part.
Student : Guillaume Clivaz
Mechanical redesign/improvement :
The aims of this project is to redesign the existing mechanical design for the bar actuator. The performances of the new solution should be at least as good as the existing solution.
Student : Florent Zufferey
Professor: Colin Jones and Christophe Salzmann
Type of project: Semester
Contact: Christophe Salzmann and Milan Korda
K027—————————————————————————-

Identification of a 3-DOF Gyroscope
Three Degrees of Freedom (DOF) Gyroscope is an experimental platform to teach rotational dynamic challenges. Some practical applications of Gyroscopes include space vehicle attitude control, momentum wheel control, navigation, satellite orientation, autopilot systems.
In this project, the objective is to identify and develop an appropriate model for a 3-DOF Gyroscope available in Automatic Control Laboratory of EPFL.
MER: Alireza Karimi
Type of project: Semester
Contact: Mahdieh Sad Abadi
Student: Marie Pierre Morand
K022———————————————————————————

Active suspension system for a car
Active suspension for cars is a very active topic of both academic and industrial research. Different control strategies have been examined so far, both in simulations and real-time experiments.
The interested student should first study the basic literature in the field. Then, a basic simulator should be built in Simulink, based on the models given in the literature. Next, the (nonlinear) model should be adopted to the Linear Parameter Varying (LPV) framework. A simple LPV controller, based on the developed LPV model, providing good performance should be designed. The tradeoff between the conflicting goals of passenger comfort and road handling will be studied in simulation. Finally, the possibility of simplifying obtained controller to the semi-active suspension architecture will be investigated.
MER: Alireza Karimi
Type of project: Semester
Contact: Zlatko Emedji
Student: Watana Kaewkerd
B051——————————————————————————-

Modeling and real-time optimization for a PEM fuel cell stack for automotive applications
Fuel cells are electrochemical devices that produce electrical power from hydrogen and oxygen, while producing water. For automotive applications, proton exchange membrane (PEM) fuel cells show the best potential. However, these devices need to operate close to maximal efficiency to be viable, while respecting several stringent operating constraints to avoid reducing the lifetime of the cells and the autonomy of the vehicle. In automotive applications, the operation of PEM fuel cells is ruled by the need of producing the amount of power required by the driver. Whenever this power load changes, the optimal operating conditions of the fuel-cell stack change as well, thus calling for real-time adaptation of the operating conditions.
The aim of this project, which will be performed in collaboration with Belenos Clean Power Holding, a spin-off of the Swatch Group, is to develop a real-time optimization (RTO) strategy for improving the efficiency of a PEM stack in the presence of operating constraints and power load changes. Optimal operation will be obtained by manipulating the inlet flow rate of oxygen and its pressure at the stack inlet. For this purpose, both a detailed and a simplified model of a PEM fuel-cell stack will be developed. The simplified model will be used to implement the RTO scheme, while the detailed model will serve to mimic the reality and validate the computed set of optimal conditions.
Professor: Dominique Bonvin
Type of project: Master
Contact: Singhal Martand and Grégory Francois
Student: Helene Rudaz
K030——————————————————————————-
 Formation flying control with reduced communication requirement
Formation flying control with reduced communication requirement
Formation flying control consists of a set of spacecraft accomplishing a mission cooperatively. The different architectures of formation such as leader-follower, virtual, and cyclic are determined by the manner of cooperation between the spacecraft. One of the main difficulties in formation flying control is that there are some limitations on the communication links between spacecraft controllers. Therefore, in order to control such systems, some constraints on the control structure should be imposed.
A leader-follower formation system of several vehicles is considered in this project. The main objective is to design a controller with minimum communication links such that all vehicles fly at the same desired speed and the desired distances between them are achieved.
To this end, first the system should be described by a linear time-invariant model. Then, the performance objectives for the system are determined in terms of some weighting filters. A sparse controller is finally designed.
As an optional step, the nonlinearity of the formation model and its time-varying nature (mainly due to the slowly changing mass) can be considered as uncertainty in the LTI model.
Requirements: Good background in robust control, MATLAB, and Simulink..
MER: Alireza Karimi
Type of project: Semester
Contact: Mahdieh Sadabadi
Student: Dimitri Mazourenko
J018——————————————————————————–
 Playing FED with monetary policy and model predictive control
Playing FED with monetary policy and model predictive control
Central Banks (CB) (e.g. Federal Reserve of the US – FED, European Central Bank – ECB, People’s Bank of China – PBC) have gradually become crucial components of the financial system. They are the institutions mainly responsible for the state monetary policy. This means that they control the supply of money in the economy in order to affect inflation, unemployment, the exchange rate and even the business cycle itself.
To do so, CB possess a number of powerful tools, namely
1. Selling and Purchasing Securities (the state is borrowing and lending to and from the economy – thus removing or injecting money).
2. Setting the Reserve Requirements (every bank is required to hold money in reserve, relative to the money it has lent out – so more money in reserve, less in the economy and vice versa).
3. Altering the discount rate (the state can determine how expensive are Federal loans to an eligible banking institution).
The private and foreign financial institutions carefully study every movement of the CB (e.g. the FED), since it can inflict broad and long-term effects in the economy. The FED itself pays careful attention to its actions since it is aware of the previous fact but also has a responsibility to attain certain targets without destabilizing the financial system.
This project will attempt to use Model Predictive Control (MPC) as a replacement to the FED board of directors with the goal of achieving optimal results while keeping the economy stable in the long run. MPC is an advanced methodology that can be used to compute control strategies that minimize a cost function over the span of a time horizon while also respecting constraints and accounting for unexpected events in the system.
Attempting to accurately model the vastly complex financial system can be a haunting task. Moreover, different theories and schools of thought exist assuming different first principles and quite often suggesting conflicting approaches for the explanation of the internal structure of the economy. Alternatively, a Machine Learning (ML) approach can be used to conjecture the response of the economy to the FED actions based on past data.
References:
- Monetary policy in Federal Reserve System
- Open Market Operations in Federal Reserve Bank of New York
- Economic Research in Federal Reserve Bank of St. Louis
Professor: Colin Jones
Type of project: Semester
Contact: Ioannis Lymperopoulos
Student : Karim Elkhatib
L047———————————————————————————
 Modelling and optimal control of a hydrofoil boat
Modelling and optimal control of a hydrofoil boat
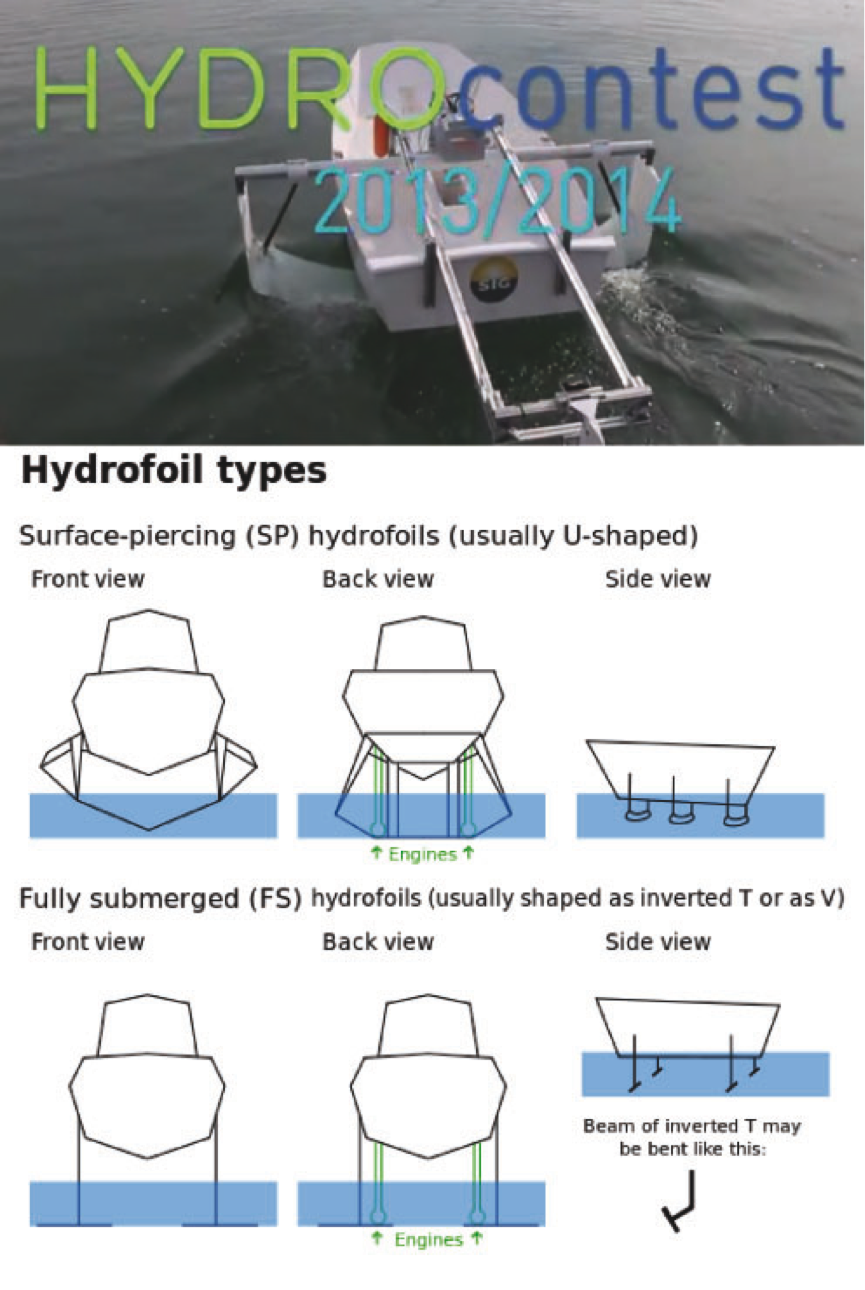
The energy company HYDROS has launched an engineering contest for students in scientific studies. The goal of the project is to construct the fastest hydrofoil boat which consumes the least amount of energy. A starter kit is provided on which the teams must improve the design (see link for more information).
Designing the optimal path between the assigned navigation points can decrease the time of arrival to destination significantly and at the same time respect the required energy constraints. The optimal path can consist both of the trajectory in space, desired variations in velocities and the right operation of the control surfaces in order to properly track the generated path.
One of the key elements in applying control techniques is to obtain a mathematical description of the boat dynamics. Starting from a standard boat model one can perform parameter identification to estimate the coefficients of the system according to the input of the other EPFL collaborating teams and experiments. The next step is to build a simulator that uses the system and the natural environment model to generate possible evolutions of the trajectory under different control schemes. The simulator is going to be employed as an optimal trajectory generator and model predictive control will be used to track the optimal path. Real time measurements (at the boat and on-shore) will be used to update the weather / lake conditions and plan ahead.
Professor : Roland Longchamp and Colin Jones
Type of project: Semester
Contact: David Ingram, Andrea Alessandretti, Philippe Mullhaupt, Ioannis Lymperopoulos
Student : Damien Benoit
J019——————————————————————————–

Fly Phone
The most advanced, autopilots for small RC aircraft are no comparison for the might of a smartphone. Specifications read (for a PX4) 168Mhz ARM microcontroller and a ton of 192KB of RAM compared to a (Google NEXUS) S4 Snapdragon, running at 1.7Ghz and hosting 2GB of RAM. Integrated components such as Wi-Fi, Bluetooth, GSM, accelerometers, GPS, gyroscopes, barometers, ambient light sensors and a compass into the same device allow for fast deployment.
The fly phone project intents to explore the superior computational and sensor capabilities of modern smartphones in an attempt to be used as autopilots for small autonomous vehicles.
The goal of the project is to construct a hardware/software platform that can be used for the development of advanced control methods.
Professor: Colin Jones
Type of project: Master
Contact: Ioannis Lymperopoulos and Jean Hubert Hours and Andrea Alessandretti
Student : Mathieu Bresciani