B053—————————————————————————–
 Temperature and pressure control for professional coffee machines
Temperature and pressure control for professional coffee machines
To have the best possible coffee in your cup, not only do the coffee beans need to have the right taste and quality, but the process to extract the different flavors must also be under tight control. Water temperature and pressure are two important parameters that need to be controlled in a coffee machine to get the right taste. These two parameters can also have a big impact on energy consumption depending on the technology used to control them.
The goal of this project is to develop an environmentally friendly and efficient control system for the next generation of coffee machines. Using a recently developed characterization of the system components, a strategy for accurate control of both temperature and pressure will be elaborated. The student will first adapt and validate the process model that was developed as part of a previous project. He will then develop an appropriate control strategy using Matlab and implement it on a prototype coffee maker using LabView. The performance of the new system will be benchmarked with respect to existing technologies.
Professor: Dominique Bonvin
Type of project: Master
Contact: Julien Billeter
Student: Matteo Keller
|
Most of the work will be done at the Laboratoire d’automatique of EPFL, with occasional visits to the research center of Parker Hannifin in Geneva for the experimental implementation. |
J036——————————————————————————–
 Model-based control of quadcopters
Model-based control of quadcopters
Quadcopters serve as a challenging test bench for control and machine learning algorithms in academia. Commercially, they are usually used for surveillance. However, if reliable control is ensured, a fleet of quadcopters can be used for physically demanding and complex tasks, such as carrying heavy payloads or building structures.
In this project, we aim to develop and test control algorithms, with which we will control quadcopters and accomplish physical tasks. The project will involve, development of a state estimator with the available camera setup, and implementation of model based control algorithms. The state estimator and controllers will be tested on the available quadcopters at LA.
Professor: Colin Jones
Type of project: Master
Contact: Altug Bitlislioglu, Tomasz Gorecki and Jean-Hubert Hours
Student: Walid Amanhoud
K037——————————————————————————–
 Robust control of mechatronic systems
Robust control of mechatronic systems
This master project consists in applying robust control concepts for position control of two mechatronic systems developed at CSEM.
1) Comsteer device: The objective is to steer the angular position of a mirror on a MEMS. The mirror is held by a membrane and can tilt along two axes. The main challenge comes from the nonlinearity of the system as the resonance frequency of the device changes with its angular position. The other challenges come from the significant noise level and very high closed-loop bandwidth specification. Robust control should be used to achieve stability and performance over the entire operating space. The control process has to be embedded on a microcontroller and applied to different prototypes and experimentally validated.
2) MTG device: The objective is to control the position of the mobile stage of a Fourier interferometer. This mobile stage holds the reflector of the interferometer. This instrument will be used in the third generation MeteoSat satellite to measure the spectrum of infrared waves emitted by the earth. The mobile stage is steered with a linear actuator and has one degree of freedom. Challenge arises as very tight constraints on speed stability and exported forces are required. FEM simulations were performed and a complete frequency response of the system is available.
The control laws are designed using the Frequency-Domain Robust Control (FDRC) toolbox developed at the EPFL Control Laboratory.
MER: Alireza Karimi
Type of project: Master in industry
Student: Etienne Thalmann
 |
This project is carried out in collaboration with CSEM in Neuchatel. |
K041——————————————————————————–
 Inverse dynamic control of a robotic arm in task space
Inverse dynamic control of a robotic arm in task space
Redundant manipulators have been designed to improve manipulability, flexibility and dexterity. One of the most fundamental issues regarding redundant manipulators is task space manipulation; i.e. finding a joint level command corresponding to the desired end-effector’s trajectory.
There are two general solutions to solve this problem. The first option involves, directly solving the inverse kinematics problem by finding a feasible joint trajectory given the end-effector’s trajectory. An alternative option is to use a task space inverse dynamic controller.
The aim of this project is to implement a task space inverse dynamic controller to control a redundant robot. The student will implement this in C/C++ in a simulator in Linux environment and then with the real robot, a 7 Degree of Freedom KUKA LWR.
This project is carried out in collaboration with LASA in EPFL
Professor: Aude Billard and Alireza Karimi
Type of project: Master
Contact: Sina Mirrazavi
Student: Guillaume Clivaz
K039——————————————————————————–
 Control of an Air-Hockey Robot
Control of an Air-Hockey Robot
Over the previous semesters we have designed and built a basic framework for a robot that is able to play air-hockey. A good control scheme has been found and implemented. The next step is to transfer the system to a real air-hockey table and to design and implement a method to track the puck. We will use a camera positioned over the playing field to locate the puck and aid the positioning of the robot arm.
The aim of this project will be to adjust the existing hardware for the new table and to design a vibration-free structure to attach the camera. The camera then needs to be interfaced with a microcontroller which will perform the image processing to detect the puck and robot arm. The microcontroller and image processing can be programmed in Labview.
The student should be familiar with basic image processing and Labview. He should also be interested in improving the design of mechanical parts.
MER: Alireza Karimi
Type of project: Master
Contact: Christophe Kammer
Student: Florent Zufferey
J042——————————————————————————–
 Distributed optimization for the smart-grid
Distributed optimization for the smart-grid
With the need to integrate distributed renewable energy sources and storage systems, micro-grids have become a popular concept.
The project will investigate solutions to match the stochastic power demand using renewable power generators on a micro-grid. This can be casted as an optimization problems for which distributed solution strategies are currently raising interest in the community. The problem needs to be solved repeatedly within a limited time interval, which is a challenging task from a distributed perspective. After a modelling phase, you will develop novel real-time distributed optimization algorithms to tackle this problem.
Professor: Colin Jones
Type of project: Master
Contact: Altug Biltislioglu, Jean-Hubert Hours and Georgios Stathopoulos
Student: Yue Jiang Liu
K027—————————————————————————-

Identification and control of a 3-DOF Gyroscope
Three Degrees of Freedom (DOF) Gyroscope is an experimental platform to teach rotational dynamic challenges. Some practical applications of Gyroscopes include space vehicle attitude control, momentum wheel control, navigation, satellite orientation, autopilot systems.
A 3-DOF Gyroscope is available in Automatic Control Laboratory of EPFL. This system has a multivariable nonlinear model. The objective of this project is to identify a linearized model of the system and compute a robust digital controller based on the identified model. A VI for LabView should be developed and the controller should be applied on the real system.
MER: Alireza Karimi
Type of project: Semester
Contact: Predrag Milosavljevic
Student: David Struzenegger
B055——————————————————————————–
Dissipativity and optimal control
In many optimal control problems (OCP), a certain dissipativity condition plays a crucial role to determine the infinite horizon behaviour. In this project, we aim at investigating several simple optimal control problems via numerical and analytical methods. The main goal is to verify the mentioned dissipativity condition for given examples. The project involves the following subtasks:
- Learning basic concepts of optimal control and the analytical solution of OCPs.
- Learning how to solve small scale OCPs via numerical methods.
- Investigating how the mentioned dissipation inequality can be verified for these examples.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Timm Faulwasser
Student: Robin Nydestedt
B056——————————————————————————–
Real-time optimization of a fuel cell stack
Solid oxide fuel cells (SOFCs) are electrochemical systems converting hydrogen and oxygen to water and thereby converting chemical energy into electrical energy. Due to their high efficiency SOFCs could potentially replace large fossil-fuel driven power plants in the future. However, ecological and economical requirements imply that one should operate SOFCs close to their maximal efficiency.
In this project, we seek a motivated student to work on real-time optimization (RTO) of SOFC stacks. The project aims at the formulation and Matlab implementation of optimization problems. More precisely, the project involves the following subtasks:
- Analysis of an existing RTO implementation for an SOFC stack.
- Literature research on penalty and barrier function methods.
- Design of an improvement RTO formulation to avoid infeasibility of the optimization due to load changes.
- Simulation of the improved formulation.
Suitable candidates should have a good background in Matlab programming, control and optimization. Pre-knowledge about fuels cells would be plus.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Timm Faulwasser, Tafarel de Avila
Student: Martin D’Hoffschmidt
B058——————————————————————————–
Modeling and optimization of a fuel cell system
Solid oxide fuel cells (SOFCs) are electrochemical systems converting hydrogen and oxygen to water and thereby converting chemical energy into electrical energy. Due to their high efficiency SOFCs could potentially replace large fossil-fuel driven power plants in the future. However, ecological and economical requirements imply that one should operate SOFCs close to their maximal efficiency.
In this project, we seek a motivated student to work on modelling and optimization of SOFC systems. The project aims extending of existing models of SOFC stacks to models SOFC systems, i.e., besides the stack also the fuel reformation should be taken into account. Based on the extended model, the problem of optimizing the system efficiency should be formulated and tackled numerically. More precisely, the project involves the following subtasks:
- Analysis of an existing model of an SOFC stack.
- Literature research on modelling of fuel reformation.
- Extension of the existing SOFC model to take the fuel reformer into account.
- Numerical optimization of the efficiency of the overall system.
Suitable candidates should have a good background in Matlab programming, thermodynamics, control and optimization. Pre-knowledge about fuels cells would be plus.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Timm Faulwasser, Tafarel de Avila
Student: Thomas D’Hondt
J034——————————————————————————-
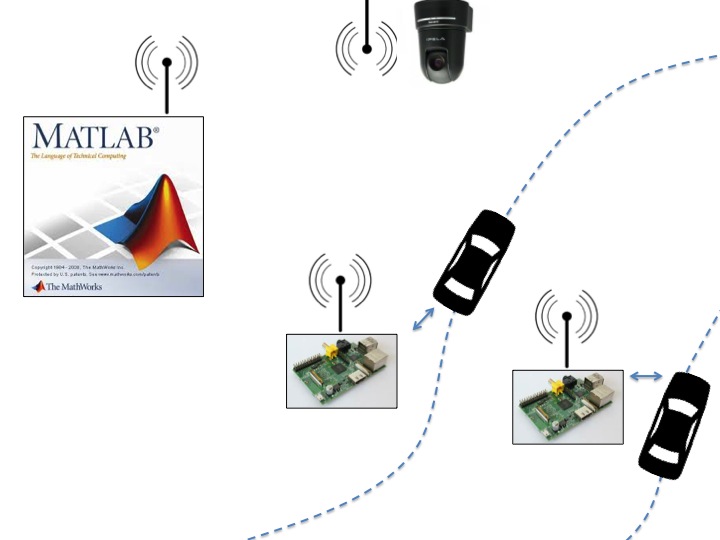 Robots Arena: Network based system of motion control of robotic vehicles
Robots Arena: Network based system of motion control of robotic vehicles
This project focuses on the realization of a software and hardware platform for the control of multiple robotic vehicles.
The structure consists of three main components interconnected via WiFi:
- A Matlab server, for coordination.
- Micro computers (e.g. Raspberry pi) mounted on board of the vehicles an connected to the actuators and sensors of the vehicles.
- Camera system in charge of detecting the position of the vehicles.
Requirements: the student should possess (or be willing to earn) great practical skills (hardware/programming) and enthusiasm!
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Student: Leo Sibut
J033——————————————————————————-
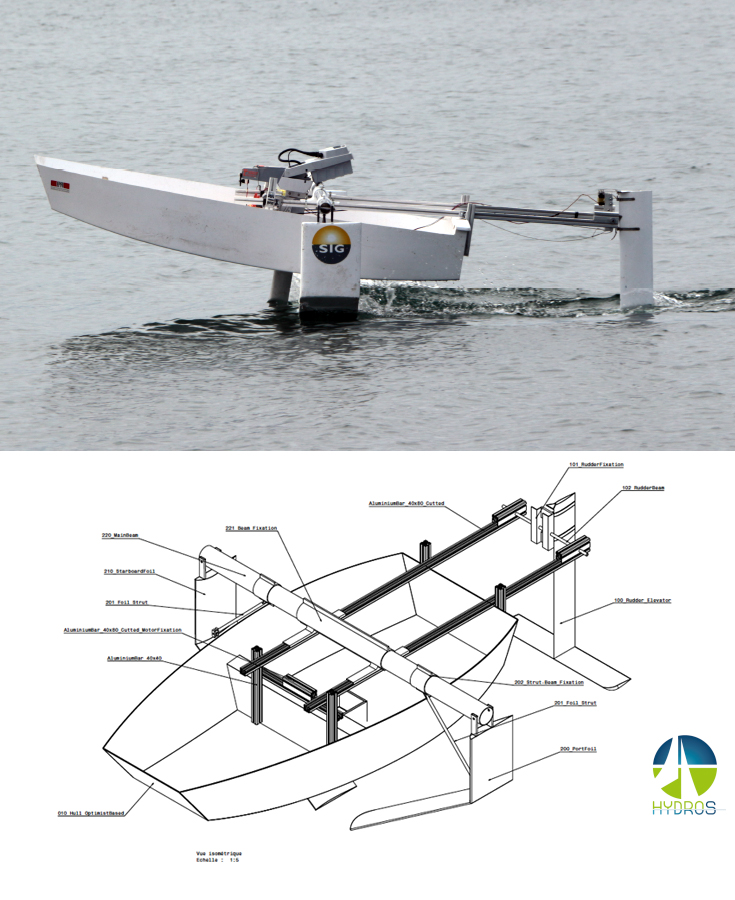 Control of a hydrofoil boat
Control of a hydrofoil boat
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2014 (see link). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project focused in modeling the boat dynamics and discovering the optimal control policies in simulation. The second part, due to start in the next spring semester, is going to explore the interaction of the boat with the environment in a realistic setting. Model-mismatch and external disturbances might deem the control policies suboptimal or even infeasible. The project will focus in robustifying the system against uncertainties.
Professor : Colin Jones
Type of project: Semester
Contact: Ioannis Lymperopoulos and Ehsan Sarshari
Student: Jerome Clavel
J018—————————————————————————-
 Forecasting and Controlling of Financial Bubbles
Forecasting and Controlling of Financial Bubbles
There have been claims [1] that simple models can predict financial bubbles. These models postulate that such bubbles exhibit super-exponential growth (of price, volume, etc). One explanation for this is the herding behaviour of traders that creates positive feedback. However, eventually this growth becomes unsustainable and at a critical time leads to the bursting of the bubble and the crash of the price.
With this project we aim to replicate the bubble forecasting methods, verify their predictive power for different sets of data and finally design a control strategy that can ameliorate the effect of the bubble bursting using modern control methods.
[1] A. Johansen, O. Ledoit, D. Sornette, “Crashes as critical points”, International Journal of Theoretical and Applied Finance 3 (2000) 219–255.
Professor: Colin Jones
Type of project: Semester
Contact: Ioannis Lymperopoulos, Milan Korda
Student: Maxime Valdemarin
BM001—————————————————————————–
Compensation et asservissement d’une liaison articulaire (articulation artificielle du robot Coman)
L’objectif de ce projet est de modéliser et commander une liaison articulaire qui consiste en un entrainement électrique suivi d’une inertie couplée par une ressort. Ce type d’organe équipe certains robots humanoïdes (Coman). La commande actuelle est fondée sur l’utilisation d’un ressort de relative grande rigidité et l’utilisation uniquement de la mesure à la sortie de l’articulation pour la rétroaction. On se propose d’utiliser à la fois la mesure de l’angle (position) en amont du ressort et en aval de celui-ci, tout en diminuant la constante de rigidité. L’objectif étant de pouvoir assurer de la complaisance tout en fournissant des grandes accélérations de l’organe effecteur. On étudiera également un couple perturbateur (frottement sec et visqueux) mal connu et instationnaire au niveau du joint où se situe le ressort. Ces forces non linéaires seront également du type jeu et hystérèse. On étudiera la conséquence de ces effets sur le comportement en boucle fermée selon les stratégies envisagées.
Professor: Dominique Bonvin and Philipp Mullhaupt;
Type of project: Semester
Contact: Ehsan Sarshari
Student: TAO Dominique Marc