B056——————————————————————————–
 Novel model identification methods for chemical reaction systems
Novel model identification methods for chemical reaction systems
Measurements taken over time during the course of a reaction are an important source of information regarding the underlying chemical reaction system. These measurements contain information on the influence of various effects such as the reactions, mass transport phenomena, inlets and outlets. The key challenge is to interpret the information provided by these measurements and to develop a reliable model that can be used to improve the performance of the process.
Two main approaches can be used to identify kinetic models of reaction systems. In the simultaneous model identification, rate expressions are postulated for all reactions, and the parameters are estimated by comparing measured and modeled concentrations for all combinations of rate candidates. An alternative is the incremental model identification (IMI), which decomposes the identification task into several sub-problems, one for each reaction. In the rate-based IMI, the parameters are estimated by fitting rates to experimental rates obtained by differentiation of measured concentrations. In the extent-based IMI, the rates are integrated to yield extents, and the parameters are estimated by fitting the extents to experimental extents obtained by transformation of measured concentrations. The advantages of IMI is that competing rate models can be compared for each reaction and model parameters can be estimated at a very low computational cost.
Recently, we have found that there exists a general formulation of IMI, which includes rate-based IMI and extent-based IMI as particular cases. Therefore, we are interested in investigating the potential of hybrid IMI approaches and comparing their performance with purely rate-based or extent-based IMI approaches. This research topic corresponds to the state of the art in the field of model identification in the sense that no one has ever thought about filling the conceptual gap between the two extreme IMI approaches.
The aim of this project is to develop a novel model identification method that combines the advantages of both IMI approaches. In this project, the student will learn the state of the art in simulation, model identification and parameter estimation of reaction systems in a Matlab programming environment.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Julien Billeter, Diogo Rodrigues
J046——————————————————————————-
 Modeling and control of airborne wind energy systems
Modeling and control of airborne wind energy systems
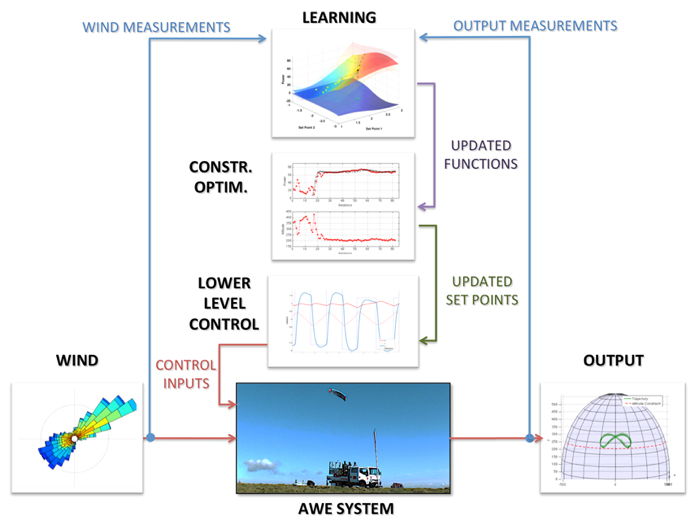
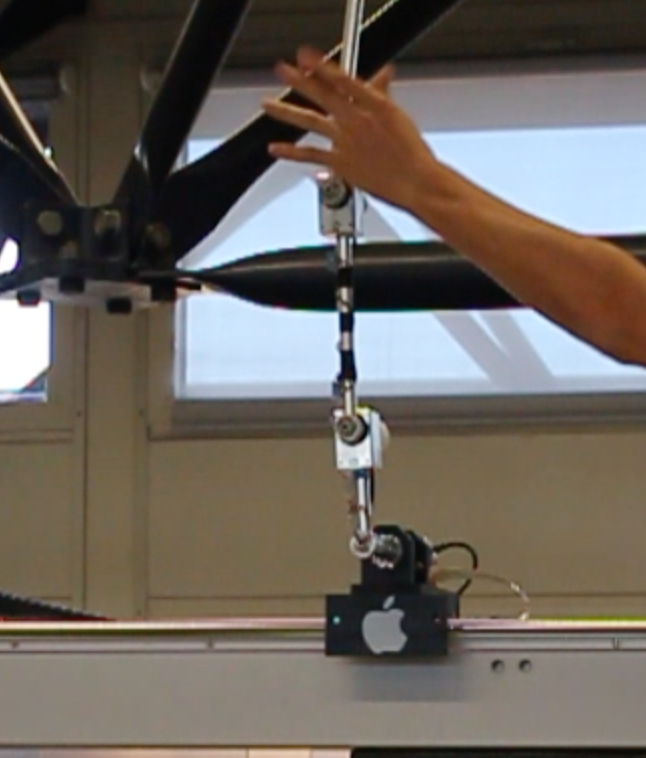
Wind resources tend to be significantly stronger and more consistent with increasing altitude. Furthermore conventional wind turbines quickly reach their limit in accessing these higher winds due to structural limitations. This creates a potential for improved power generation with Airborne Wind Energy systems. A frequent design for such systems includes a flying airfoil tethered to a ground station. The station is equipped with a power generator and the aerodynamic force generated by the flying wing is used to drive this generator as the tether reels out under the aerodynamic force. Once the tether reaches its maximum length the wing enters a low force generating gliding trajectory and the tether is reeled back in with low power consumption, thus generating a net positive power generation cycle.
The execution of such motion however requires overcoming critical control challenges and perform control and optimization for improved power generation in presence of system and environmental (wind) uncertainties. The proposed project will provide opportunities to students to work on different aspects of the system and has several subprojects as listed below:
- System modeling and nonlinear control:Will explore methods for modeling the system for better control and will explore the tools of robust and adaptive nonlinear control theory to implement controllers for the existing experimental platforms.
- Path following model predictive control: Will implement and test model predictive control (MPC) schemes for tracking of power optimal trajectories in the experimental system.
- Data based modeling and control of experimental systems: We will explore the use of Gaussian Process Machine Learning tools to model the dynamics and performance characteristics of the system to find the optimal control inputs for the system. The learning based models further provide an improved prediction performance crucial for the model based control methods explored above.
Realistic high fidelity simulators and working experimental platforms are ready and will be available to bench test the controllers and learning algorithms on the real system.
Professor: Colin Jones
Type of project: Semester or Master
Contact: Sanket Diwale, Petr Listov and Ioannis Lymperopoulos
K044——————————————————————————-
 High precision intensity control of a proton beam
High precision intensity control of a proton beam
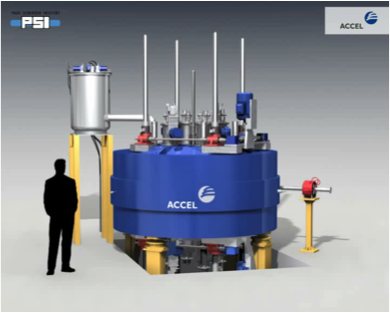
At the center for proton therapy in Paul Scherrer Institute (PSI), the cancer patients are treated using spot scanning techniques. In order to push technology forward and open the possibility to treat additional tumor sites (moving tumors like liver and lung), a new beam delivery modality by continuous beam line scanning of tumors is currently under development. Such a technique requires controlling the intensity of the proton beam with a high precision, especially during fast changes, expected to happen on a sub-ms time scale. The proton intensity is controlled by a current feedback loop that adjusts the vertical deflector voltage of the proton accelerator.
The goal of this project is to identify a set of linear models for the dynamics of the accelerator in different operating points. These models are then used to design an advanced controller that robustly stabilizes the system and give good performance in all operating points. The new controller should be validated in simulation as well as on the experimental system.
This project is carried out in collaboration with the center of proton therapy in PSI.
MER: Alireza Karimi
Type of project: Master in industry
Contact: Alireza Karimi
 |
This project is carried out in collaboration with the center for proton therapy in Paul Scherrer Institute (PSI) in Switzerland. |
J033——————————————————————————-
 Optimal control of a hydrofoil boat
Optimal control of a hydrofoil boat
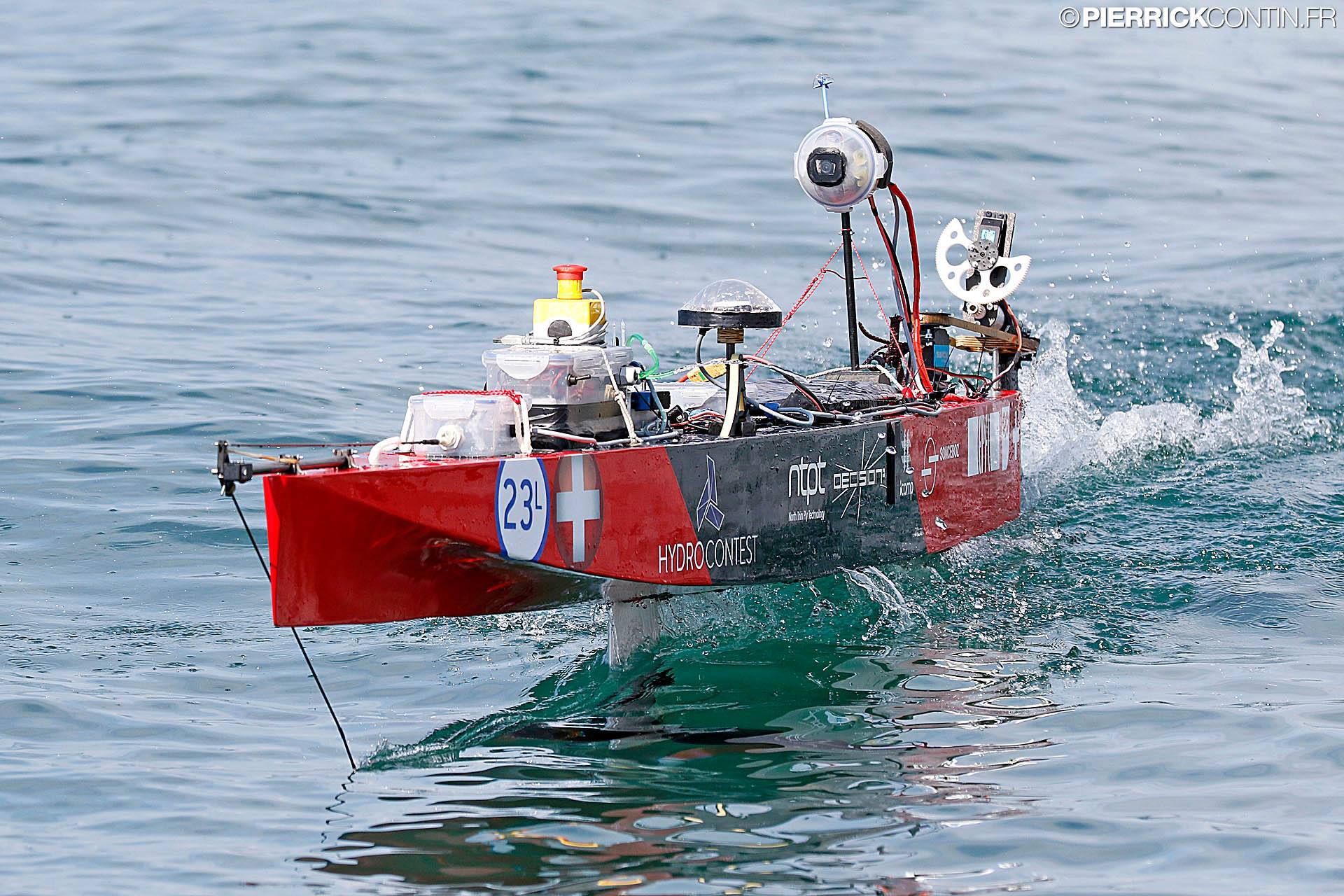
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2017 (see contest, promo video). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project will be focused on identification and modelling of the boat dynamics. The second part is going to explore nonlinear optimisation-based techniques for the boat state estimation. Finally the developed estimation algorithm would be implemented on an embedded platform (ARM based) and deployed on the boat to enhance tracking performance.
Requirements: background in System and Control Theory, experience with C++ and Matlab (or Python). Knowledge of ROS and mathematical optimization will be a big plus.
Professor : Colin Jones
Type of project: Semester / Master
Contact: Petr Listov
K051——————————————————————————–
 Trajectory planning and optimal control of multiaxis positioning systems
Trajectory planning and optimal control of multiaxis positioning systems
Mikron Automation needs to improve the control of its NC axis solutions in order to optimize throughput while minimizing energy consumption. This can be performed by proposing new trajectory planning algorithms and optimal control of multi-axis positioning systems.
Trajectory planning: A new algorithm should be developed and implemented on two different multi-axis positioning systems. This algorithm must take into account constraints given by the topology of the environment (fix obstacles, given extraction/ insertion trajectories at the beginning, respectively the end of the movement). It must be considered that the end position of the movement always varies, but is known at least a few ms before movement start.
Optimal control: A new optimal position controller should be designed and implemented in two different multi-axis positioning systems. The new controller should optimize the closed-loop bandwidth considering the thermal constraints of the actuators and the mechanical vibration of the system. The possibility of performance improvement using the Iterative Learning Control (ILC) algorithm should be investigated.
The first experimental system is a 4 axis Cartesian architecture gantry (X,Y,Z + rotation axis combined with the Z axis). The X and Y axes are linear-motor-based, the Z axis is based on a spindle actuated by a rotary motor, the C axis is a rotary motor. The second system consist of a 2-axis, Cartesian architecture system. Both axes are based on a linear motor.
MER: Alireza Karimi
Type of project: Master in industry
Student: Ludovic La Placa
 |
This project is carried out in collaboration with Mikron SA in Boudry, Switzerland. |
K027—————————————————————————-

Quadropter demonstrator design and programming
The goal of this project is to modify and program a quadcopter such that it can be used as a demonstrator in future control systems courses. This includes modifying the hardware to include an additional range sensor, designing a basic controller and programming a bluetooth interface such that the quadcopter can be steered from a PC or smartphone.
MER: Alireza Karimi
Type of project: Semester
Contact: Christoph Kammer , Predrag Milosavljevic
B065——————————————————————————–
 Application of Real-Time Optimization to the path following problem
Application of Real-Time Optimization to the path following problem
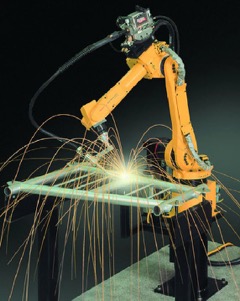
The objective of path following is to follow a reference geometric shape (for e.g., a circle) in minimum time. Many industrial robot tasks, such as welding, glueing, laser cutting, and milling can be casted as path-following problems. Often, an optimization problem is solved to find the minimum time while satisfying constraints and system dynamics. The challenge in defining minimum time trajectories arises due to uncertainty in system dynamics. Traditionally, this challenge is overcome by using state feedback to update the system dynamics and remove uncertainty.
Real-time optimization (RTO) attempts to remove the uncertainty by adapting the optimization problem instead of updating the system dynamics. The goal of the project is modeling and optimization of a 3 DoF robotic arm and comparing RTO approach with traditional path following approach. A good background in Matlab programming, control and optimization is desired.
Professor: Dominique Bonvin
Type of project: Semester
Student: Peter Lichard
Contact: Ehsan Sarshari and Martand Singhal
B057——————————————————————————–
 Demand response with chemical production plants
Demand response with chemical production plants
Large scale decentralized power generation from renewable sources increases the difficulty of maintaining the power grid within desired operational states, due to the increased uncertainty in the power demand and generation.As an alternative to constructing new power plants to cope with this issue, a viable option is demand response programs targeted at consumers. Demand response means consuming less power on the request from the grid as it is over burdened and the power demand can not be met by the production side. The grid provides incentives in terms of lower power costs or rewards for the consumers participating in the program.
In this project, we will consider chemical production plants with high electrical heating/cooling demand, and develop methods to assess and exploit their demand response potential by shifting the power consumption profile of a batch production. In particular, we will explore the effect of demand response on the optimal operation of the chemical plant and investigate the economic feasibility.
Requirements: Background in MATLAB programming, modelling of chemical reactors, control theory and optimization.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Altug Bitlislioglu, Martand Singhal
B066——————————————————————————–
 Real-time optimization applied to airborne wind energy systems
Real-time optimization applied to airborne wind energy systems
Airborne Wind Energy (or kite power) is a promising emerging wind-power technology. It exploits the aerodynamic force generated by a kite to generate power, either by driving a generator or by pulling a boat. The open problem of optimally controlling a power-producing kite during dynamic flight is currently of great technological relevance. The kite is free to fly almost any path, provided it does not crash. However, experimental studies have confirmed that the path taken by the kite significantly affects the power it can generate. While an approximate optimal path can be calculated off-line using a simplified model, the problem of determining the optimal path for the real kite in real time is still an open problem.
The project aims at finding the optimal path for kite enery generation system using real-time optimization methodology. A good background in Matlab programming, control and optimization is desired.
Professor: Dominique Bonvin
Type of project: Semester or Master
Contact: Martand Singhal, Sanket Diwale
MC001——————————————————————————–
 Control of a triple arm inverted pendulum
Control of a triple arm inverted pendulum
The LA recently upgraded its single arm inverted pendulum into a triple arm inverted pendulum. The mechanical part as well as the measurements part are now completed. The fun part can begging. The challenge of this project is to control the triple inverted pendulum. Control scenarios will first be simulated using mathematica and/or matlab The implemented and validated using LabVIEW.
This project requires the following courses: Control Systems or Automatic and Commande Multivariable or equivalent. Nonlinear control will be a plus.
Teacher: Philippe Mullhaupt and Christoph Salzmann
Type of project: Semester or Master
Contact: Christoph Salzmann and Ehsan Sarshari
B062——————————————————————————–
 Real-time optimization of a fuel cell system in rapid load following SOFC
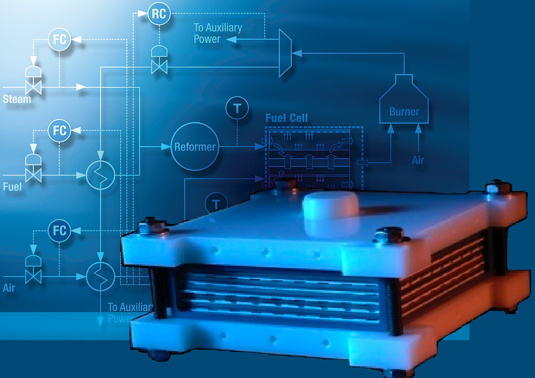
Real-time optimization of a fuel cell system in rapid load following SOFC
The current emerging power generation systems require a technology that can provide high efficiency, flexibility, safety, and environmentally friendly energy sources. Solid-oxide fuel-cell (SOFC) systems have received increasing attention due to their long-term stability, high efficiency, flexibility in terms of the types of fuel that can be utilized, and low emissions.
Video of the SOFC’s working principle:www.youtube.com/watch
We propose to investigate the control and real-time optimization (RTO) of SOFC stacks and systems. More precisely, the project involves the following tasks:
- Analyze the available SOFC models and associated optimization techniques.
- Apply a model predictive control (MPC) approach to an SOFC stack in order to avoid steep temperature variations.
- Implement the same technique on an SOFC system where more equipment is considered.
- Couple MPC with an RTO technique.
- Simulate the proposed control techniques applied to a SOFC system.
Candidates should have a good background in Matlab programming, control and optimization. Some knowledge of fuels cells would be a plus.
Professor: Dominique Bonvin, Jan van Herle
Type of project: Semester
Contact: Tafarel de Avila Ferreira, Alejandro Marchetti
J041——————————————————————————–

Identification and control for riderless motorcycles
Controlling a riderless motorcycle is a challenging task as the dynamics are highly nonlinear and non-minimum phase. Moreover, suspension or chain pull effect make the dynamics more complicated to model accurately.
In the first phase of this project, we will focus on hardware and software design for the autonomous control of a real Thunder Tiger motorcycle.
After that, based on simulations and literature, we will investigate the proper modelling of a motorcycle. The next task will be to perform system identification experiments. In the last phase, we will design and compare different controllers that will be implemented on the Thunder Tiger motorcycle.
Skills: Matlab, Control systems, System Identification and enthusiasm !
Professor: Colin Jones
Type of project: Semester or Master
Contact: Luca Fabietti and Shukla Harsh Ambarishkumar
J037——————————————————————————–
 Fast Toy Lab – Design of micro-scale cars for automatic racing
Fast Toy Lab – Design of micro-scale cars for automatic racing
The Fast Toy Lab is developing a high-speed, micro-scale autonomous course for small-scale RC cars. We are aiming at producing extremely fast and tiny cars and controllers capable of racing against all comers!
This project will design a autonomous car for racing task based on a new 1:27 scale Min-Z car. The student will integrate an IMU board for communication and control onto the Min-Z car and identify the model of the modified car.
Followings are the possible steps for the project:
- Survey literatures for race car design.
- Integrate IMU board (for communication and control) and encoders to the car.
- Identify the model for the new 4-wheel driven car and develop simulation platform.
- Investigate control strategies, if time permits.
Requirements: Knowledge of Control Theory and Electronics and Matlab
Professor: Colin Jones
Type of project: Master or Semester
Contact: Shukla Harsh Ambarishkumar
K052——————————————————————————-
 Multi-rate robust controllers for blending processes with large time delays
Multi-rate robust controllers for blending processes with large time delays
Blending of raw materials to achieve a desired product quality continuously or for a batch (e.g. container, silo, pile) is important in many industrial domains such as food, beverage, mining, chemical, energy, and cement. If the raw material compositions vary significantly, a fixed recipe for the raw material feeder proportions cannot be applied anymore. Instead, the raw material proportions are typically adjusted automatically based on the composition of the blended product measured on-line or at-line. Typically, raw materials with low quality variability (e.g., high grades, correctives) are used to correct quality changes of bulk raw materials with large variability (e.g., low grades, from quarries or mines).
In this project, two applications in the cement industry and coal-fired power stations are studied using a MIMO controller: (i) in raw mills of the cement industry, the manipulated variables are the feeder flowrates of the raw materials (e.g. limestone, clay, sand, iron ore), the controlled variables are nonlinear functions of the product oxides, and the measurement device is an at-line XRF spectrometer with significant transport and measurement delay. (ii) In coal stockyards of power stations, the manipulated variables are the reclaimer flowrates of the various subpiles with high-, low and normal-grade coals, the controlled variable is e.g. the calorific value with an upper limit on a selected oxide, and the measurement device is an on-line PGNA analyzer spectrometer with variable transport delay.
Recently, a new robust controller design using frequency-domain data has been proposed in the Automatic Control Laboratory of EPFL. This method is based on loop-shaping in the Nyquist diagram under infinity norm constraints on closed-loop MIMO transfer functions (Galdos et al. 2010). Various types of robust MIMO controllers for the case of varying input material compositions and large time delays have been designed using convex optimization techniques (de Oliviera 2011; Oliveira, Amrhein et al. 2011; Dreyfus 2017).
The aim of this project is to apply this method to the design of blending controllers for plants with large, possibly varying time delays as well as low-frequency averaged measurements. A novel multi-rate robust controller and a robust Smith-Predictor controller will be compared in terms of stability and performance for the two MIMO applications. Simulations will be done off-line in Matlab/Simulink using a simplified model and in real-time using a link to Siemens Simatic WinAC using a nonlinear model implemented in O_Blend.
MER: Alireza Karimi
Type of project: Semester or Master
Contact: Dr. Michael Amrhein
J049——————————————————————————-
 System identification and control for a single stage rocket
System identification and control for a single stage rocket
The objective of the project is to identify aerodynamic characteristics of a rocket and resolve the aerodynamic uncertainties to create a benchmark rocket simulator. The student will further investigate active attitude control schemes for the rocket in presence of parametric uncertainties and external disturbances. As a third stage for the project the student will design an optimal control policy for an active aerodynamic braking system to stop the rocket at a target apogee.
Professor: Colin Jones
Type of project: Semester
Contact: Sanket Diwale