Predict Lab Software

Our software is available on the lab’s github page.
A few of our projects are highlighted below.
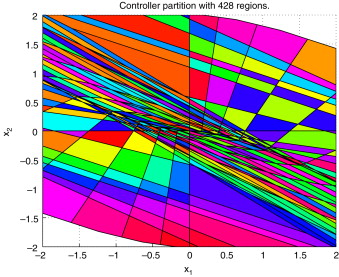
MPT3
Multiparametric Programming Toolbox 3

PolyMPC
PolyMPC: An Efficient and Extensible Tool for Real-Time Nonlinear Model Predictive Tracking and Path Following for Fast Mechatronic Systems. Developed at the Automatic Control laboratory EPFL as part of the AWESCO project.
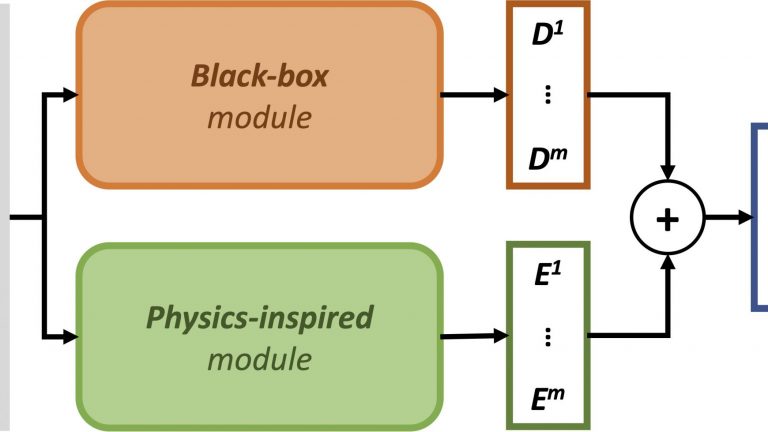
EvanQP
EPFL Verifier for Approximate Neural Networks and QPs

openKITE
OpenKITE is a ROS package for simulation, estimation and control of rigid-wing airborne wind energy kites. Developed at the Automatic Control laboratory EPFL as part of the AWESCO project.