WSS Funding
Source : https://mediatheque.epfl.ch
Motivation and goal
Impedance pumps are simple designs that allow the generation or amplification of flow. They are fluid-filled systems based on flexible tubing connected to tubing with different impedances. A periodic off-center compression of the flexible tubing causes the fluid to move and generate flow. Wave reflection at the impedance mismatch is the primary driving mechanism of the flow.
Chosen approach
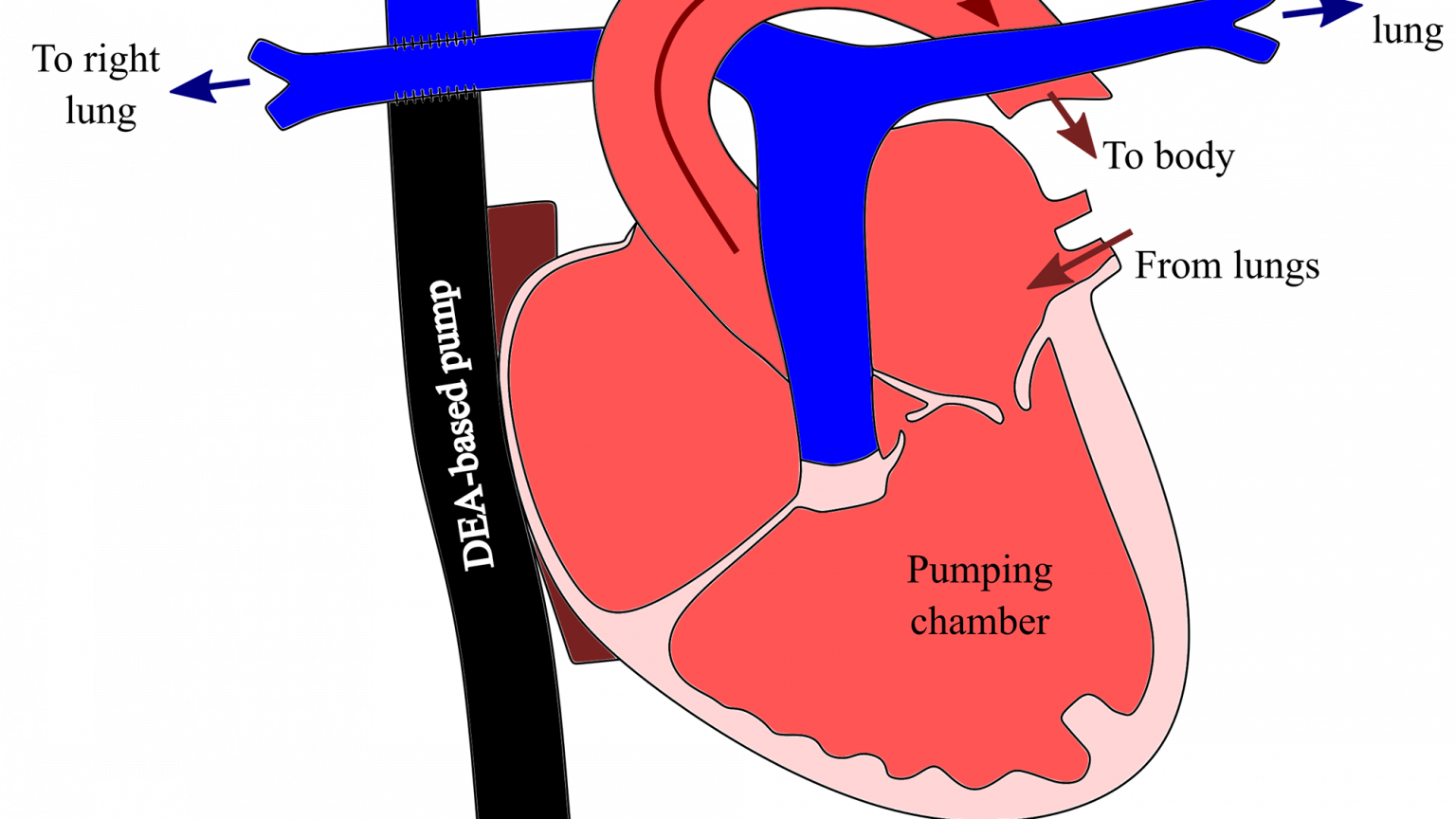
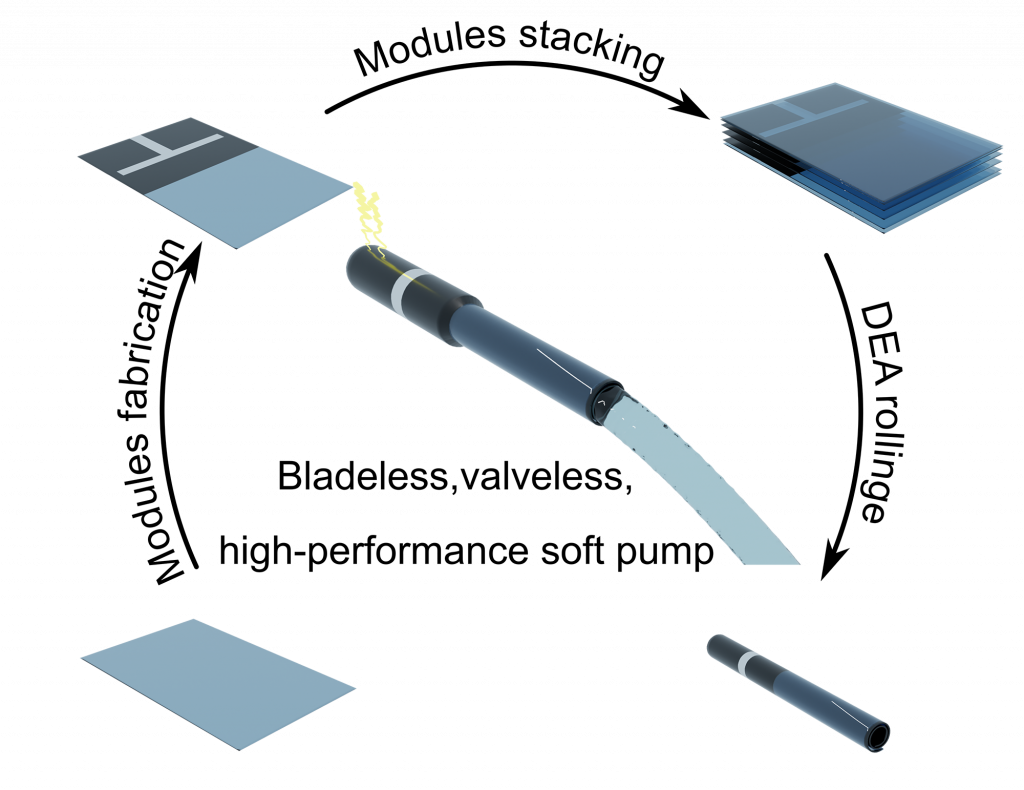
Here, we present an approach to bladeless, valveless soft pumping via dielectric elastomer actuators. The soft pump design is inspired by the embryonic heart mechanism, also known as an impedance pump.
Current state of the research
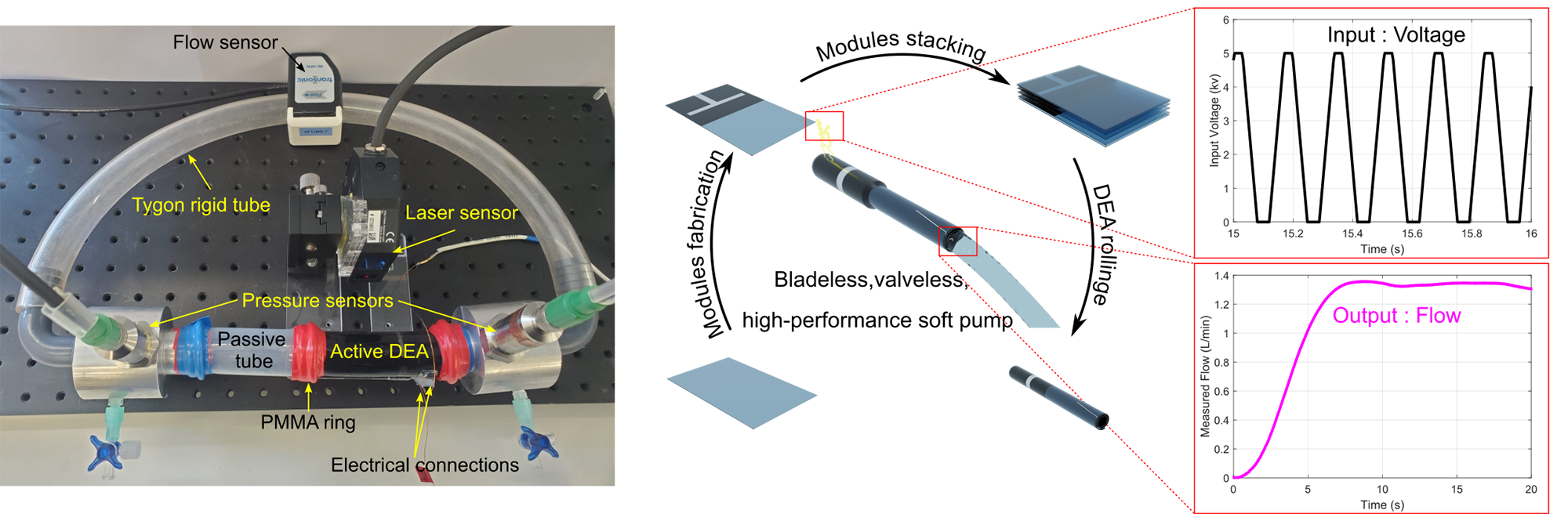
By adjusting the input signal parameters (frequency, magnitude, etc.), the flow properties can be controlled and tuned to the desired application requirements. The high performance of the proposed approach (up to 1.35 L/min) has been demonstrated theoretically and experimentally.
Future work
Our goal is to utilize this innovative approach to tackle Fontan failure, a complication that may arise following heart surgery for congenital defects. This pump seamlessly integrates into the Fontan procedure by substituting the traditional conduit without necessitating any additional modifications. The straightforward design and high performance of the proposed pumping concept give it the potential to be disruptive in many applications, especially in the biomedical field.
Publications
Warning
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.