Integrated actuators – Prof. Y. Perriard
Note: Projects are intended for Microengineering, Electrical Engineering, Computer Science and Mechanical Engineering sections.
For information and registrations contact:
- Prof. Yves Perriard at: yves.perriard@epfl.ch
- Paolo Germano at: paolo.germano@epfl.ch
For opportunities to carry out a Master Project in foreign academic institutions or with one of our Swiss industrial partners, please contact Prof. Y. Perriard.
Transportation fees between EPFL and Neuchâtel will be covered.
- Project # 1 – Advanced control of dielectric elastomer actuators
- Simon Holzer
Dielectric Elastomer Actuators (DEAs) are deformable materials frequently employed in soft robotics, distinguished by high energy density. Often referred to artificial muscles, they deform based on the electrostatic principle, where the application of high voltage induces thickness reduction which will lead to an increase of surface in the other directions.
This project aims to apply an advanced control algorithm for soft robots to enable small and fast displacements. DEAs are non-linear systems and traditional control strategies like PIDs lack in precision. Thus, the task of this semester project would be to integrate an improved control algorithm (e. g. model predictive control). During the project, the student will do a study on the state of the art, implement the algorithm in a chosen environment (LabView/Python or others possible) and test the functionality by experiments on soft robots. Successful completion of ME-425 Model Predictive Control course is beneficial and recommended.
The following tasks will be done during your project:
– Performing a state of the art about existing control algorithms for soft robots and further needed information for the project
– Choice and implementation of a promising control algorithm
– Experiments on existing DEA platform to show abilities of the implemented method
– Writing project report
Keywords: Model predictive control, soft robotics, biomedical engineering

S. Holzer, B. Tiwari, S. Konstantinidi, Y. Civet, Y. Perriard, in: ACTUATOR 2024; International Conference and Exhibition on New Actuator Systems and Applications, Wiesbaden (2024) VDE Verlag
. - Project # 2 – Dielectric elastomer actuators for new applications in biology
- Simon Holzer
The Center for Artificial Muscles (CAM) in Neuchâtel is specialised in the development of soft robotics devices for medicine and biology [1]. Our soft robots are based on dielectric elastomer actuators (DEA) which converts electrical energy into mechanical energy.
The use of dielectric elastomer actuators in different research fields promises new applications. By applying a mechanical stimulation, human cells are stimulated which leads to changes, for example, in the cell cycle. Besides the mechanical stimulation, DEAs can offer, if used in a correct manner, other advantages useful in biology.
The aim of this project is to research the ability of DEAs as actuators in the field of acoustofluidics. The student will work on an interdisciplinary project which connects insights from fluid dynamics, soft robotics and biology.
The following tasks will be done during your project:
– Performing a state of the art about existing actuators in cell biology, acoustofluidics and further needed information for the project
– Proof of concept
– Implementation of physical model
– Experimental testing in a real situation containing DEAs
– Writing project report
Keywords: Acoustofluidics, soft robotics, biomedical engineering
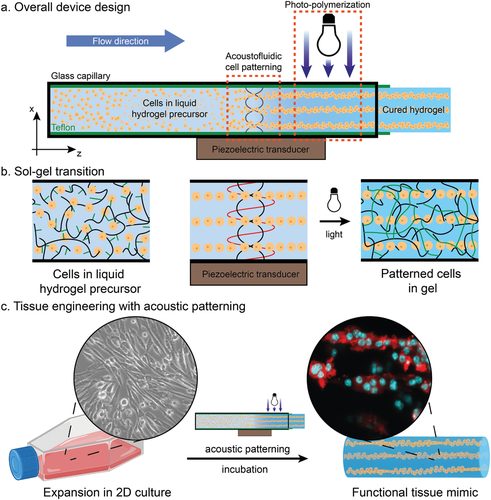
D. V. Deshmukh, P. Reichert, J. Zvick, C. Labouesse, V. Künzli, O. Dudaryeva, O. Bar-Nur, M. W. Tibbitt, J. Dual, Advanced functional materials (2022) 32,30.
. - Project # 3 – Design and prototype of an artificial biological urethra – Transversal Isotropic material and Hyperelasticity
- Quentin De Menech
The human urethra is a complex tubular organ that allows to empty urine from the urinary bladder. Due to its hyperelasticity and transversely isotropic property, the design of an artificial urethra is a real scientific and engineering challenge. [1], [2].
Within the Center for Artificial Muscles (CAM)-EPFL, we are studying the capability to design a new kind of urethra that would have properties similar to the biological one.
As a student, you will be responsible for:
– Performing a state of the art about existing artificial organs and artificial urethra in particular
– Investigating hyperelasticity and material symmetries such as transverse isotropy
– Exploring existing solutions and proposing new ones to address the specifications
– Producing and manufacturing the artificial urethra prototype
– Designing test bench to test and compare the characteristics of the artificial urethra with the biological one
The student will gain knowledge in biomechanics, materials science, designing test bench and conducting experiments. A good understanding and interest on physical phenomenon and a first experience with prototyping and design in general is requested as well as keen interest on experiments.

Figure 1: Artificial urethra tube Figure 2: Transversal isotropic
Loriane André. Design and prototype of an artificial urethra. Master 1 thesis, EPFL, 2023.
[1] Zhang, Kaile et al. “3D bioprinting of urethra with PCL/PLCL blend and dual autologous cells in fibrin hydrogel: An in vitro evaluation of biomimetic mechanical property and cell growth environment.” Acta biomaterialia vol. 50 (2017): 154-164. doi:10.1016/j.actbio.2016.12.008
[2] Cloyd, J.M., Malhotra, N.R., Weng, L. et al. Material properties in unconfined compression of human nucleus pulposus, injectable hyaluronic acid-based hydrogels and tissue engineering scaffolds. Eur Spine J 16, 1892–1898 (2007). doi:org/10.1007/s00586-007-0443-6
. - Project # 4 – Design and prototype of a multi axial sensor based on dielectric technology
- Quentin De Menech
Dielectric Elastomer Actuators (DEAs) are recent type of smart materials, which transform electric energy into mechanical work. They show impressive performances as soft actuators. Capable of multidirectional actuation, large strain and high energy density, they become new references when developing soft artificial muscles. [1], [2].
Within the Center for Artificial Muscles (CAM)-EPFL, we are studying the capability to design a new kind of soft actuator that has the capability to sense multi directional deformation. The final goal of this project, is to implement this actuator within the body in order to replace urinary sphincter.
As a student, you will be responsible for:
– Making a state of the art about multi axial sensing applied to Dielectric Elastomer Actuators
– Exploring existing solutions and proposing new ones to address the specifications
– Performing simulations to estimate the design of the multi axial sensor
– Designing and prototyping a soft actuator capable of sensing multi axial displacement
– Performing tests to calibrate and validate the sensor
The student will gain knowledge in biomechanics, designing a set up and performing tests.
We are looking for a student with excellent grades in mathematics, physics.
A first experience with prototyping and mechanical design in general is requested as well as keen interest on experiments.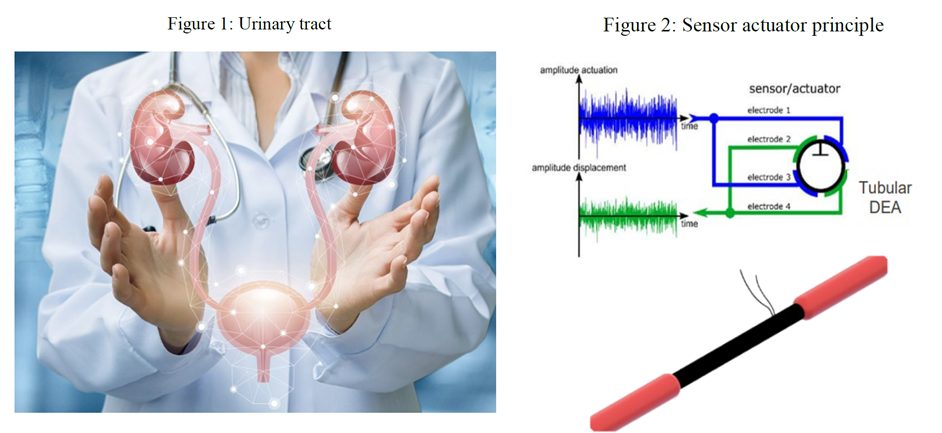
Ref:
[1] A novel soft cardiac assist device based on a dielectric elastomer augmented aorta: An in vivo study
T. G. Martinez; S. E. Jahren; A. M. Walter; J. Chavanne; F. Clavica et al. Bioengineering & Translational Medicine. 2022-08-22. Vol. 8, num. Issue 2, p. 1-15, e10396. DOI : 10.1002/btm2.10396.
[2] Control-oriented modeling and analysis of tubular dielectric elastomer actuators dedicated to cardiac assist devices. N. Liu; T. G. Martinez; A. M. Walter; Y. R. C. Civet; Y. Perriard. IEEE Robotics and Automation Letters. 2022-04-01. Vol. 7, num. 2, p. 4361-4367. DOI : 10.1109/LRA.2022.3148981
. - Project # 5 – 3D metal printing of a compliant valve
- Quentin de Menech
Dielectric Elastomer Actuators (DEAs) are a recent type of smart materials, which transform electric energy into mechanical work. They show impressive performances as soft actuators. Capable of multidirectional actuation, large strain and high energy density, they become new references when developing soft artificial muscles. [1], [2].
Within the Center for Artificial Muscles (CAM)-EPFL, we are studying the capability to design a new kind of soft actuator also called artificial muscle. However due to necrosis of the tissues once the device is attached around the urethra, and due to the electromechanical behavior of our DEA (electrical breakdown). We are designing a new actuator taking into account those factors. The final goal of this project, is to implement this actuator within the body in order to replace the urinary sphincter.
As a student, you will be responsible for:
– Making a state of the art about advanced manufacturing applied to Dielectric Elastomer Actuators
– Exploring existing solutions and proposing new ones to address the specifications
– Taking into account biological constraints as well as electromechanical ones (electrical breakdown)
– Performing simulations to estimate the optimized design of the actuator
– Designing and prototyping of the actuator (Advance manufacturing in grey room)
– Performing tests to validate the design
The student will gain knowledge in biomechanics, designing a set up and performing tests.
We are looking for a student with excellent grades in mathematics, physics. A first experience with prototyping and design in general as well as advanced manufacturing is requested.
Ref :
[1] A novel soft cardiac assist device based on a dielectric elastomer augmented aorta: An in vivo study
T. G. Martinez; S. E. Jahren; A. M. Walter; J. Chavanne; F. Clavica et al.
Bioengineering & Translational Medicine. 2022-08-22. Vol. 8, num. Issue 2, p. 1-15, e10396. DOI : 10.1002/btm2.10396.
[2] Wissler, Tobias. (2007). Modeling dielectric elastomer actuators [Doctoral dissertation, ETH]. https://doi.org/10.3929/ethz-a-005406421
.