When you access EPFL websites, we may set cookies on your devices and process personal data about you in accordance with our privacy policy. You can block cookies by using your browser settings.
CTI project in collaboration with a Swiss industrial partner
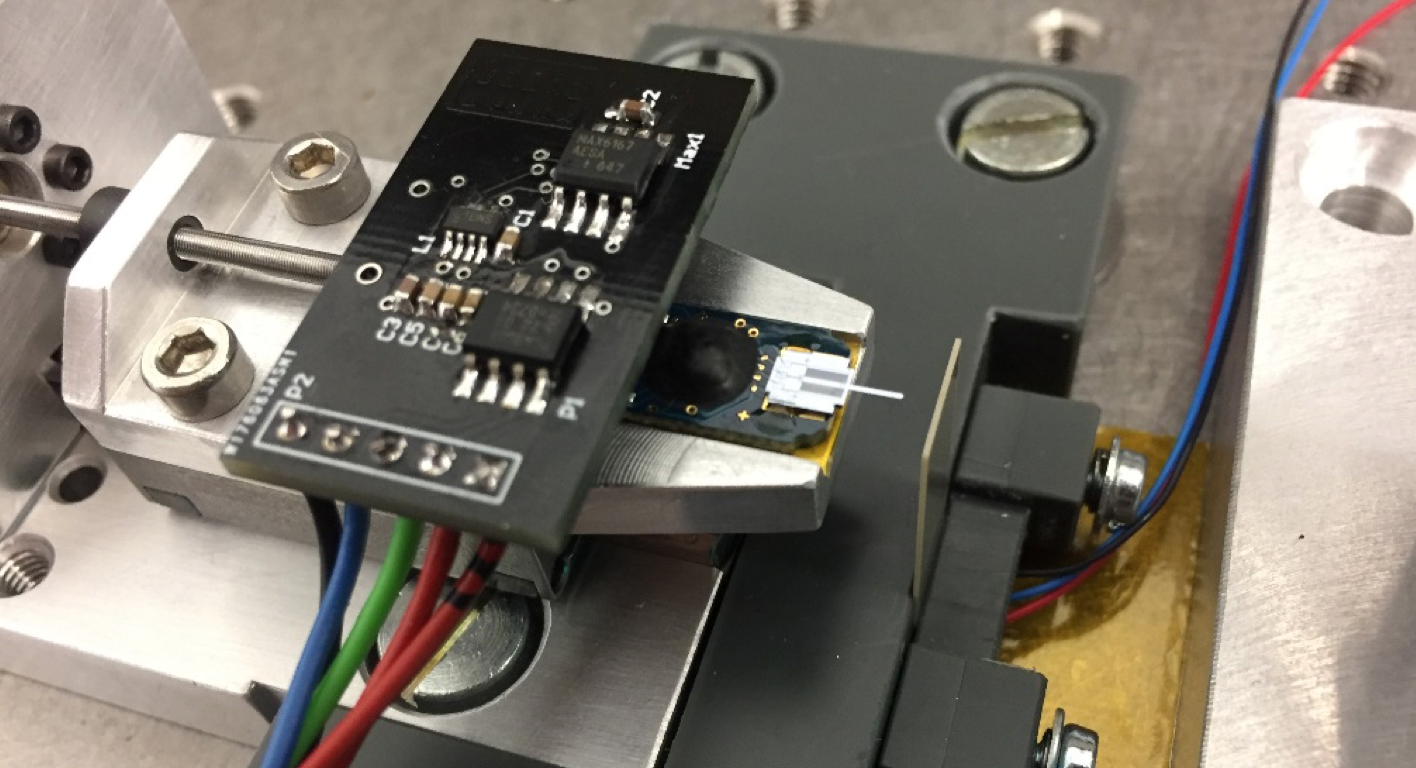
Test bench for force measurement on a piezoelectrical cantilever.
Project description
The aim of the project is to develop a muti-degrees of freedom piezo-based robotic wrist providing positioning and force sensing capabilities at submicron scale. In order to keep the wrist dimensions very compact (< 2 cm3), the Integrated Actuator Laboratory (LAI) investigates the possibility to make use of sensorless actuation technologies.
Publications
Warning
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform.
The owners of these pages are invited to recreate their publication list from Infoscience.
For any assistance, please consult the Infoscience help or contact support.
Sensorless Quasi-static Piezoelectric Actuator for Micro-Robotics
2019-01-01.22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, PEOPLES R CHINA, Aug 11-14, 2019. p. 1498-1502. DOI : 10.1109/ICEMS.2019.8922397.
2019-01-01.12th International Symposium on Linear Drives for Industry Applications (LDIA), Neuchatel, SWITZERLAND, Jul 01-03, 2019. DOI : 10.1109/LDIA.2019.8771007.
2018.2018 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Nagoya, Japan, July 4 -8, 2018. DOI : 10.1109/MARSS.2018.8481181.