Perfect robotic controls can never exist, so we work to devise control strategies for unexpected changes. We develop algorithms and controllers so that our robots are capable of reacting in a fast changing environment.
We develop approaches and applications:
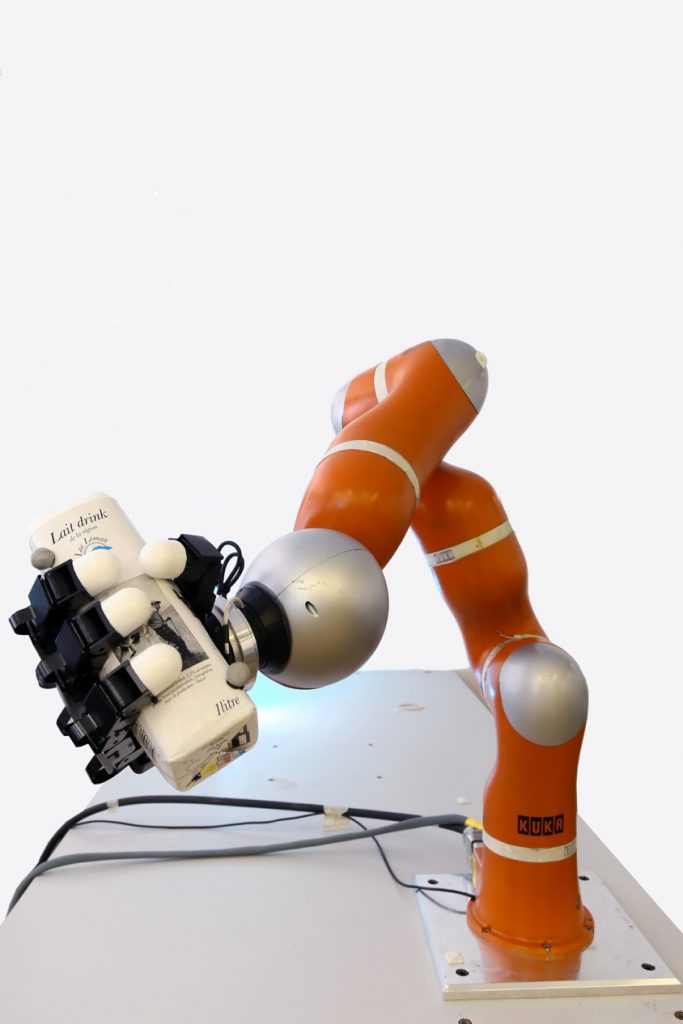
- allow us to coordinate the motion of the robots with external agents
- compensate for the uncertainties in the motion of the agents and robots
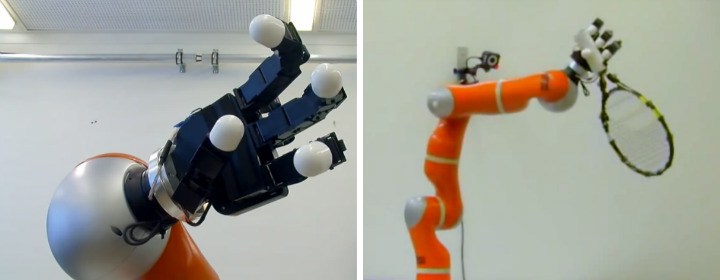
- adapting adequately and on-the-fly obstacles and sudden perturbations
- coordinate multi-armed robotic systems to improve manipulability of a system
Press
- Euronews
- Reuters
- Bloomberg
- EPFL news
- Actu epfl
- Business Insider
- IEEE Spectrum
- Globalnews
- LiveScience
- Mirror
- Telegraph
- Popsci
- Voanews
- Crazyengineers