Shared Control
Current Project Grants
Supernumerary 4-Handed Manipulation – Construction
The control of supernumerary robotic manipulators (SRM) is challenging, as it must be done concurrently with the control of the operator’s biological limbs. This project advocates for adapting technology to the human, and aims at designing control approaches that are informed by the existence of couplings across natural limbs.
Past Project Grants
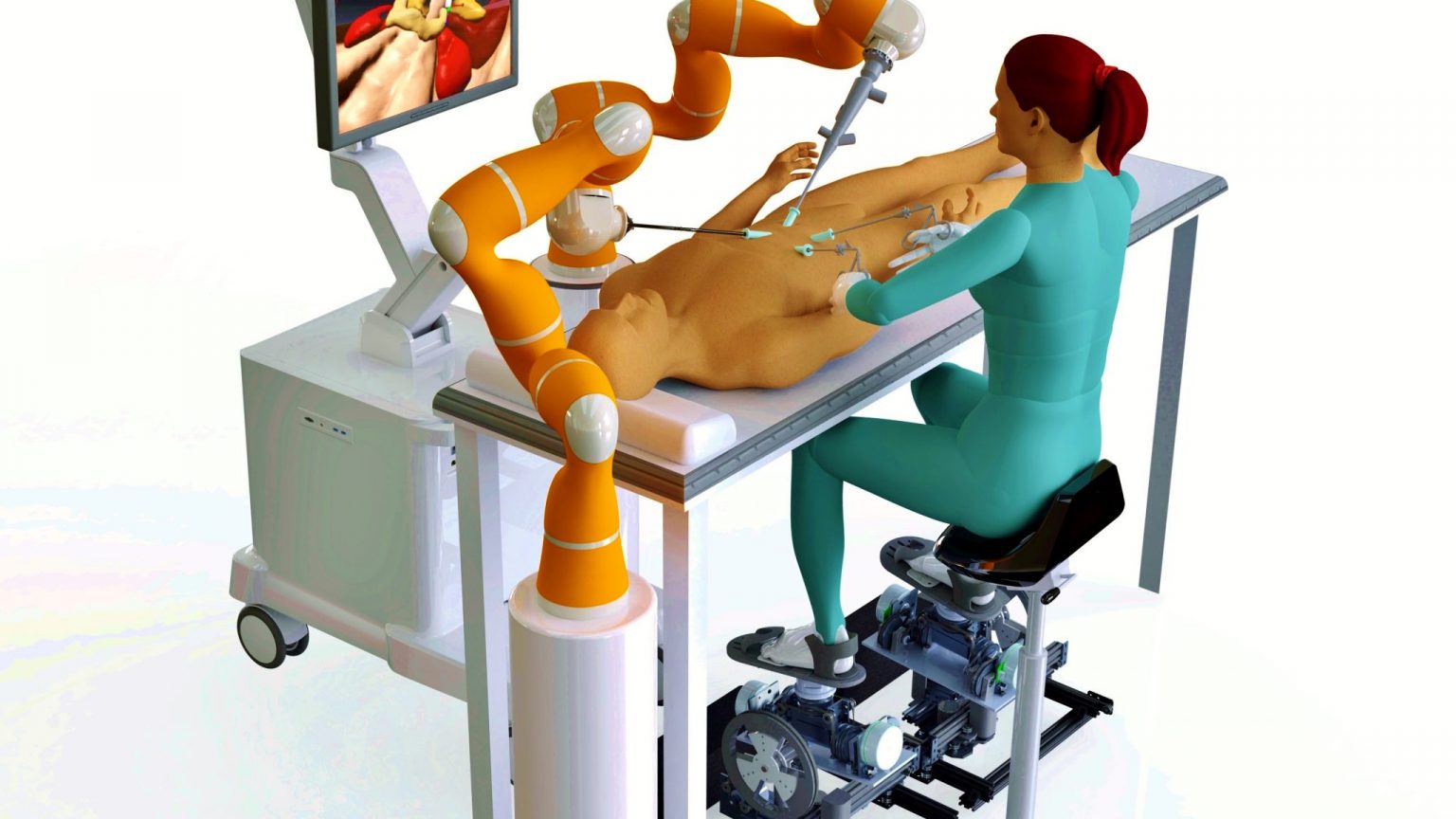
Supernumerary 4-Handed Manipulation – Laparoscopic Surgery
1 February 2017 – 30 June 2023
This project tackles the design of a 4-arms system with application to laparoscopic surgery. Currently, this task is performed by at least two people: the surgeon and one assistant who is manipulating the endoscope and the retractor. The envisioned 4-arms system would enable the surgeon to control all four instruments. This may increase synchrony in the movements and avoid ambiguity arising from miscommunication.
SecondHands
1 May 2015 – 30 April 2020
Creating a proactive robot assistant for maintenance tecnicians