| Type | Master project in industry |
| Split | 40% theory, 40% software, 10% hardware |
| Knowledge | Programming skills (Python / C++ / Unity), Signal processing, ROS (a plus) |
| Subjects | Machine Learning, Data Analysis, Signal processing, Simulation |
| Supervision | Soheil Gholami, Aude Billard |
Microsurgery demands superior dexterity in combination with excellent visuospatial skills, that can be acquired only through long training periods. To improve our understanding of these skills, we follow a cohort of microsurgeons during short microsurgery courses, conducted at the University Hospitals in Geneva (HUG).
The MSc thesis is part of a collaboration between the EPFL Learning Algorithms and Systems Laboratory (LASA EPFL) under the supervision of Prof. Aude Billard and at the University Hospitals in Geneva under the supervision of Prof. Torstein Meling. It is expected that the student spends significant time at the HUG and at the EPFL.
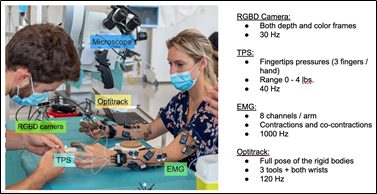
Approach
In this master thesis, the student will participate in the design of the sensors to record hand position, force application and movement changes. The student will start from an existing set-up that uses miniature pressure sensors mounted on gloves and covering the instruments and infra-red optitrack motion tracking. The student will design a new arrangement of the sensors to avoid visual obstruction. Addition of other measurement units such as EMG and RGBD vision tracking will be considered. The student will actively participate in the statistical analysis of the data gathered to date and use this information to guide the placement of the sensors. The student will also participate in the modeling of the dynamics of hand motions and pressure, by developing graphical displays and by using machine learning techniques to model the temporal evolution of these signals.
Expectation
- EMG sensors
- Motion Tracking System
- F-TPS sensor
- Cameras
References
[1] Azari, D.P., Miller, B.L., Le, B.V., Greenberg, J.A., Bruskewitz, R.C., Long, K.L., Chen, G. and Radwin, R.G., 2020. A comparison of expert ratings and marker-less hand tracking along Osats-derived motion scales. IEEE Transactions on Human-Machine Systems, 51(1), pp.22-31.
[2] Ebina, K., Abe, T., Higuchi, M., Furumido, J., Iwahara, N., Kon, M., Hotta, K., Komizunai, S., Kurashima, Y., Kikuchi, H. and Matsumoto, R., 2021. Motion analysis for better understanding of psychomotor skills in laparoscopy: objective assessment-based simulation training using animal organs. Surgical endoscopy, 35(8), pp.4399-4416.