Category: Past Projects
Domain-Decomposition Deconvolution for Very Large 3D Microscopy Images
Contact: Dr. J. Rué Queralt, Dr. D. Sage (EPFL Center for Imaging), Dr. V. Stergiopoulou (LCAV, Galatea), Dr. E. Soubies (IRIT Toulouse) Synopsis: Modern fluorescent microscopes are capable of acquiring high-resolution 3D images of an entire specimen (e.g. light sheet microscopy). This generates very large, voluminous images that are difficult to process on a computer (…)
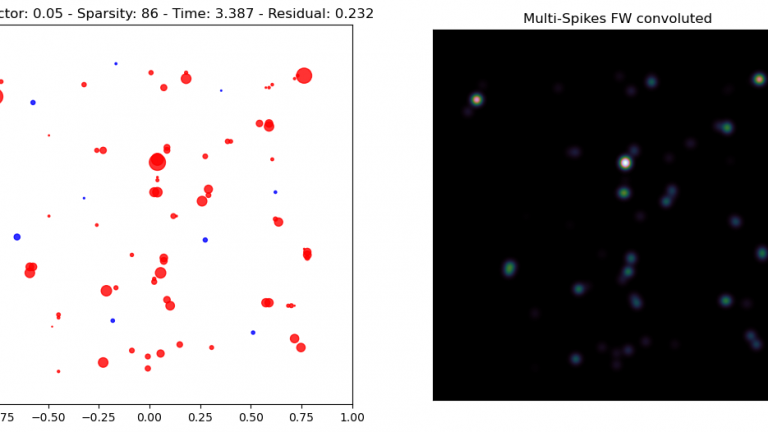
Reconstruction of Sparse Images with a Variational Approach: a Numerical Comparison of LASSO Solvers
Contact: Adrian Jarret (LCAV) Synopsis: Comparison of different LASSO solvers for the reconstruction of sparse signals in simulated contexts inspired from radio astronomy. Level: Bachelor Sections: IC Description: The LASSO problem is an optimization problem broadly used nowadays to reconstruct sparse solutions to linear inverse problems. One of the most popular solvers for numerical applications (…)

Analyze sparse and smooth signal components with optimization problems
Contact: Adrian Jarret (LCAV) Synopsis: Solving Inverse problem for Sparse-plus-Smooth composite signals Levels: Bachelor, Master Sections: IC Description: When performing experiences, researchers are rarely able to directly measure the data of interest, but rather side effects of the phenomenon, referred to as indirect measurements. The stereotypical examples are tomography (MRI imaging) that uses magnetic fields (…)

Scientific Computing Python Developer (Summer Student Assistant)
Supervisor: Matthieu Simeoni (LCAV) Contact: Matthieu Simeoni (matthieu.simeoni@epfl.ch) Keywords: scientific computing, computational imaging, GPU computing, inverse problems, convex optimisation Description: Full-time summer student assistantship (July 1st to August 31st) as a Python developer. The student (which must be currently studying at EPFL) will be expected to help with the development of (…)

Audio-based algorithms for the e-puck robot
Contact: Dümbgen, Frederike Synopsis: Audio-based source tracking and obstacle avoidance on the e-puck robot Level: BS/MS semester project Description: When compared to visual and inertial measurements, sound is highly underrepresented among the modalities commonly used for navigation, localization and mapping in robotics. This is surprising as animals such as bats and whales have evolved to (…)

Droning drones
Contact: Dümbgen, Frederike Synopsis: Exploration and exploitation of drone noise Level: MS semester project Description: The more drones become omnipresent in everyday life, the more the unavoidable propeller noise is becoming an issue. Indeed, drone noise has been shown to be more unpleasant than car noise to many people [1], and thus recent research has (…)
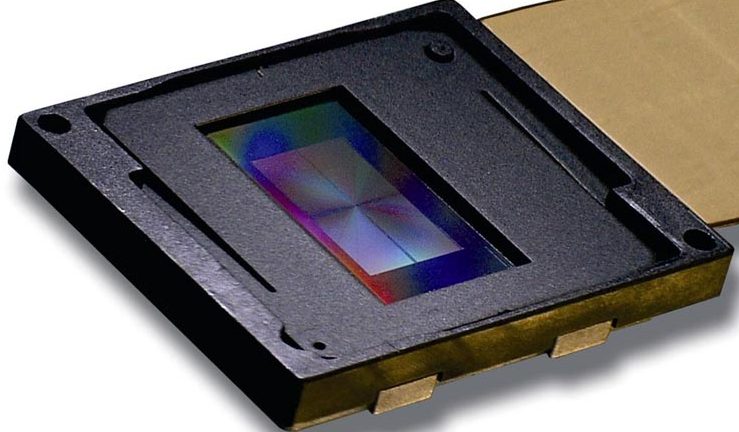
Aberration-Free Lens Design
Contact: Sepand Kashani (LCAV) Synopsis: Assess image fidelity of optical systems using pixelized lens arrays. Levels: Bachelor, Master Sections: IC Description: Lenses form core elements of camera systems: their goal is to focus light from the outside world onto an image sensor to faithfully capture a scene of interest. The focusing effect of a lens (…)
Optimisation for distance-based localisation
Contact: Michalina Pacholska Synopsis: Compare the performance of different algorithms on the task of localisation from distances of a device moving on a smooth trajectory. Level: The project can be adapted to Bachelor or Master Students. Description: The raise of self-navigating devices (be it cars or drones) requires reliable localisation methods. Simplest localisation method is triangulation (or multi-lateration), (…)
Experimental evaluation of unsupervised indoor localization
Contact: Dümbgen, Frederike, Sepand Kashani Synopsis: Experimental evaluation of unsupervised indoor localization. Level: Summer internship or BS/MS project Description: Due to their aptitude in depicting complex dependencies, neural networks are a promising candidate for indoor localization. Omnipresent phenomena such as multi-path signal propagation, shadowing and device noise introduce high noise in distances inferred from radio (…)
Interferential photography on exhibition (2 students)
Advisors: Prandoni, Paolo; Latty, Arnaud. Synopsis: Building demonstration experiments and showcases for an artistic and scientific exhibition on Lippmann photography, as part of a semester project. Level: MS/BS. Description: Gabriel Lippmann won the 1908 Nobel Prize in Physics for the development of the first color photography technique. Its principle, based on light interference, is as (…)