Category: Past Projects
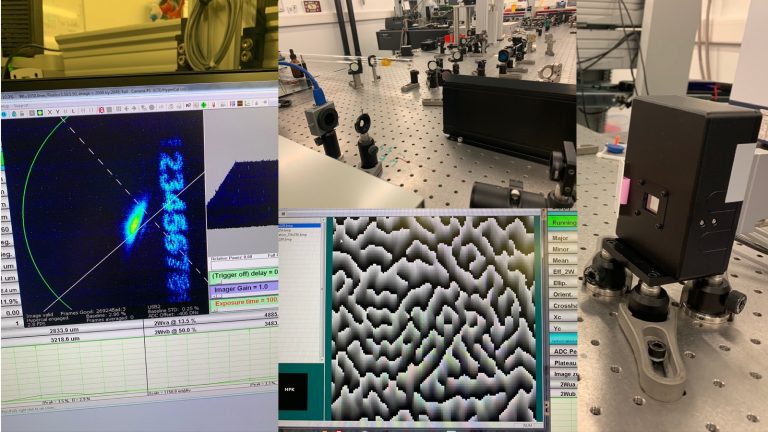
Beamforming of Light Waves for μ-scale Manufacturing
Advisors: Matthieu Simeoni (LCAV), Sepand Kashani (LCAV) and Julien Gateau (GALATEA, Microcity) Contact: Matthieu Simeoni (matthieu.simeoni@epfl.ch) Synopsis: Assess novel beamforming solutions for light waves using a spatial light modulator. Levels: Bachelor, Master (, including Master thesis) Sections: MT, IC, PH, EL Description: Lasers are often used for carving materials (…)

Audio-based drone self-localization inside cluttered rooms
Contact: Dalia El Badawy, Dümbgen, Frederike Synopsis: Study and test drone’s capability to localize itself from acoustic signals. Level: MS Description: Although it is often seen as a nuisance, scattering of sound — acoustic waves “bouncing” off physical objects — has been successfully leveraged to determine the direction of arrival of sound sources using only (…)
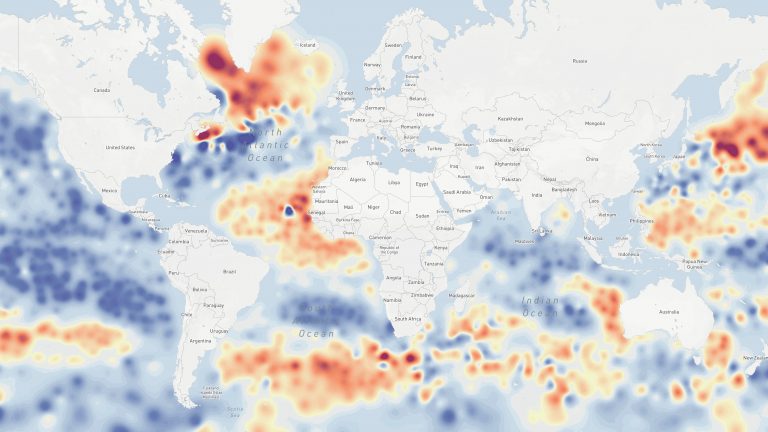
A Spline Approximation Framework for Spatio-Temporal Environmental Monitoring
Main Advisors: Matthieu Simeoni and Julien Fageot Synopsis: Develop a spline approximation framework for spatio-temporal environmental monitoring at global scales. Level: Bachelor/Master (including Master Thesis). Description: One aid towards addressing the current environmental crisis consists in building a “digital twin” of the Earth. The latter would take the form of an exhaustive computer simulation relying on past and (…)
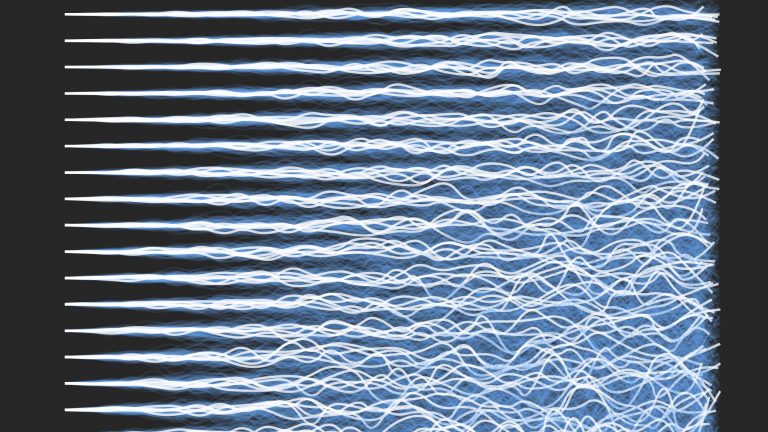
Periodic Splines and their Applications to Approximation Theory
Advisors: Matthieu Simeoni and Julien Fageot Synopsis: Obtain innovative results and methods for the approximation of periodic functions with periodic splines. Level: Master/Bachelor. Description: A spline is a piecewise-smooth function used in approximation theory, known to be an excellent tool for bridging the discrete and continuous setting. As such, it is therefore at the core of many (…)
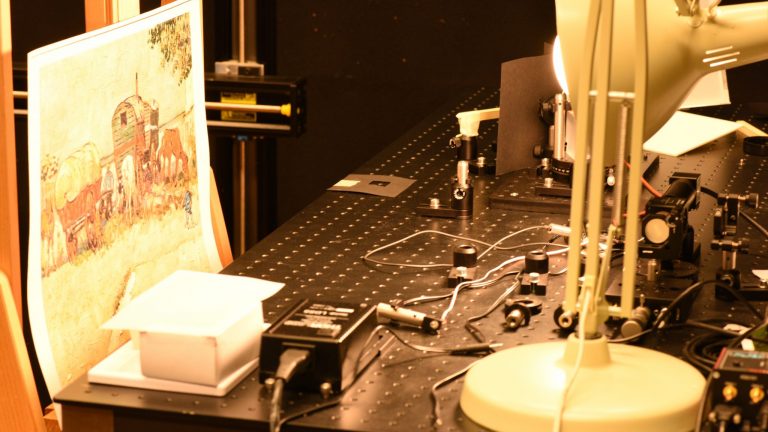
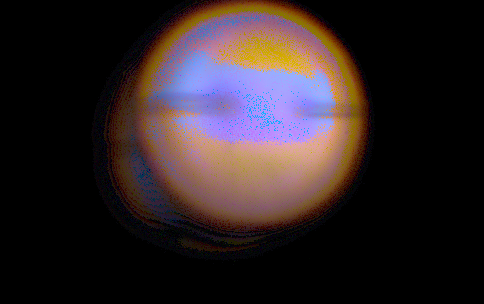
Acquiring hyperspectral images with an interferential camera
Advisors: Scholefield, Adam James; Hoffet, Adrien; Latty, Arnaud. Synopsis: Development of hardware and software to record hyperspectral images, as part of a semester project. Level: MS/BS. Description: The student will work together with the scientific and technical team on a concept successfully tested on an interferential hyperspectral camera prototype. He/she will take part in the (…)

Open-source hardware and GUI design for a blind drone
Contact: Dümbgen, Frederike Synopsis: Design a PCB and user interface for a Crazyflie drone to process acoustic and RF signals. Level: BS, MS Description: The Crazyflie (https://www.bitcraze.io/crazyflie-2-1/ ) is a developer-friendly, open-source drone solution. It comes with a customizable python client (including GUI), and open-source firmware which is readily extendable. In this semester project, we (…)
Reconstructing hyperspectral images from interferential camera measurements
Advisors: Scholefield, Adam James; Latty, Arnaud. Synopsis: Development of algorithms and software to generate and visualize hyperspectral images, as part of a semester project. Level: MS. Description: The student will work together with the scientific and technical team on a concept successfully tested on data acquired by an interferential hyperspectral camera prototype. He/she will take (…)
Learning acoustics-based localization of a blind drone
Contact: Dümbgen, Frederike Synopsis: Study and test drone’s capability to localize itself from acoustic signals. Level: BS, MS Description: Acoustic signals are inexpensive to create and record and their physics are well understood. Using only relatively cheap and light hardware, drones could therefore be equipped with audio processing capabilities. However, very few drone localization systems (…)

Angle-based drone swarm configuration recovery
Contact: Dümbgen, Frederike Synopsis: Use off-the-shelve Bluetooth angle of arrival (AoA) technology to recover the relative positions of drones in a swarm. Level: BS, MS Description: Swarms of multiple cheap and light-weight drones have become a great alternative to expensive heavy-duty UAVs. Drone swarms can reconfigure on the fly to perform complex tasks requiring for (…)
Learning multi-modal localization
Contact: Dümbgen, Frederike Synopsis: Development of a learning-based framework for indoor localization using different modalities. Level: MS Description: Due to their aptitude in depicting complex dependencies, neural networks are a promising candidate for indoor localization. Omnipresent phenomena such as multi-path signal propagation, shadowing and device noise introduce non-linear effects in the data, and make conventional (…)