Simulated Overcorrected Glenoid Implant
- Contact person: Matteo Mancuso
- People involved: Matteo Mancuso
- Partners: CHUV – OTR, CHUV – RAD, EPFL – LBO
- Funding source: CR32I2_162766 from the Swiss National Science Foundation, and Lausanne Orthopedic Research Foundation
Overview
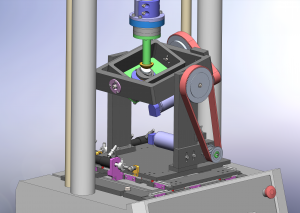
The main goal of this project was to develop and validate a robotic platform to simulate the implanted shoulder biomechanics, in particular its stability, at a patient-specific level.
This project was part of a larger-scale collaboration joining four research partners toward the aim of providing better and more reliable treatment for total shoulder arthroplasty (TSA) patients.
Methods and outcomes
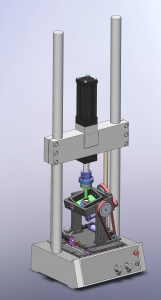
The Service de radiodiagnostic et radiologie interventionnelle (CHUV-RAD) used computed tomography (CT) techniques to reconstruct a 3-dimensional model of the humeral head and the glenoid part of the scapular bone of each patient. The CT-scan models were used to control a robotic model of the glenohumeral joint of each patient. Those replicas underwent a simulated surgery, as planned by expert surgeons of the Service d’orthopédie et de traumatologie (CHUV-OTR). This allowed to evaluate the effect of the surgical planning on the stability of the patient’s shoulder. These glenohumeral joint models was also simulated numerically by the Laboratory of Biomechanical Orthopedics (EPFL-LBO) to estimate the internal forces and moments of force of the glenohumeral joint as well as the wear at the joint-implant interface with the over-corrected glenoid implants. Our lab, the Laboratory of Motion Analysis and Measurement (EPFL-LMAM) used real glenoid implants to mechanically test translations of the humeral head over the glenoid surface and assess the risk of subluxation. The implanted patients were monitored for 12 months post-operation, and the frequency and direction of subluxation were compared with those predicted from the robotic simulator for concurrent validity.
Results
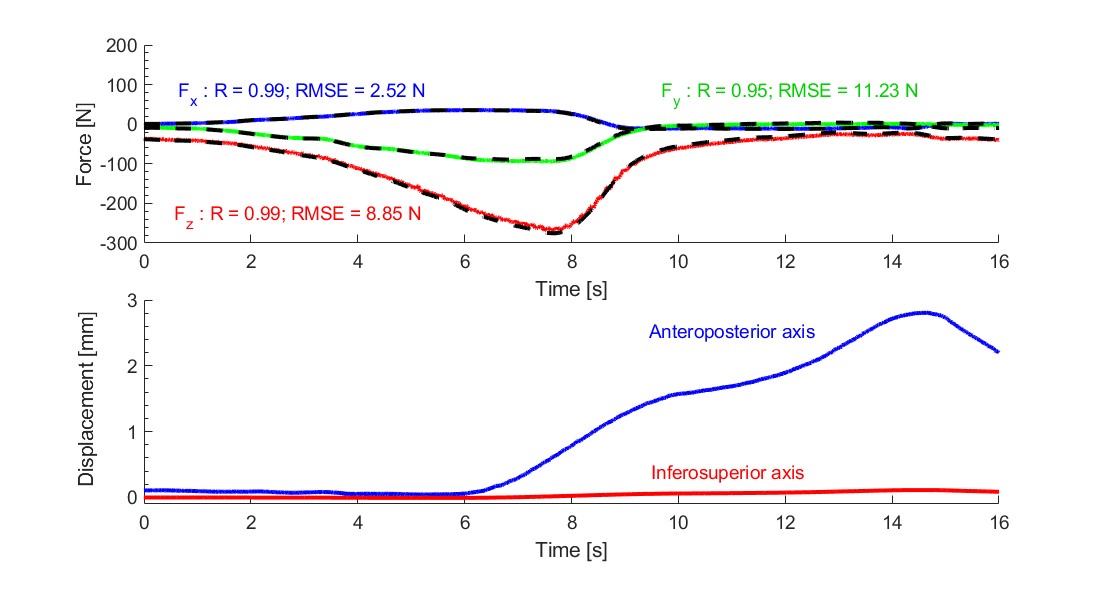
The robotic simulator was able to reproduce force patterns recorded in vivo, in static and dynamic (Figure 1) situations while using realistic glenohumeral joint orientations. However, using the numerical simulations to obtain both the force patterns and rotations of the glenohumeral joint to reproduce complete motions from tasks of daily living, displayed much worse stability in the simulation than in the real patients. The causes of this mismatch are currently being investigated.