- Contact person: Abolfazl Soltani
- People involved: Benedikt Fasel
- Partners: EPFL-ESPLAB, CHUV, Asulab, Eta, Tissot
- Funding source:
Overview:
LMAM first started the design of such an algorithm in the scope of the CTI project MINOS in collaboration with the Electronics and Signal Processing Laboratory (EPFL – ESPLAB) and the industrial partners Asulab, Eta and Tissot. The goal of this project was the development of a prototype watch that can detect locomotion periods (walking and running), count the number of steps, and estimate the speed and total distance travelled for healthy and active persons. The final product should have a high autonomy of at least one year with a conventional primary cell battery. Thus, the use of GNSS sensors or even gyroscopes had to be excluded because of their high power consumption. LMAM was responsible for the design of high level algorithms for movement detection, step counter, and speed and distance estimator based on accelerometer data only. In a second step, the algorithms were optimized and implemented on a low power microprocessor by the ESPLAB. Third, the industrial partners built a prototype and are responsible for the industrialization of the project.
Methods
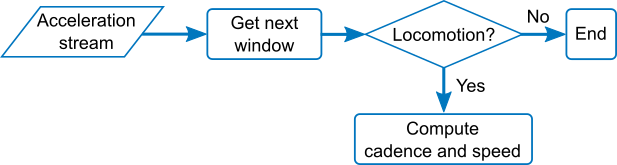
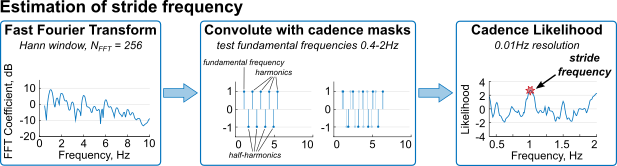
The above figure shows a graphical overview of the algorithm. The acceleration stream from the wrist accelerometer is cut into 6 second windows, shifted by one second. For each window the acceleration norm is computed and four signal features are extracted: signal energy, mean absolute deviation from gravity, difference of the current window’s spectrum with the past window’s spectrum and a cadence likelihood (a measure of how likely a periodic signal of approximately 1Hz is present in the windowed data). Then, based on these features a Hidden Markov Model (HMM) determines whether this window is to be classified as locomotion (i.e. walking, running) or non-locomotion (e.g. lying, sitting, standing). If no locomotion was detected the algorithm stops, marks this window as non-locomotion and waits for the next window. If locomotion was detected, then the algorithm continues and estimates the stride frequency according to the algorithm depicted in the figure below. Finally, multiple linear models are used for estimating the walking speed based on the mean and standard deviation of the acceleration norm, the stride frequency and the person’s height. Step count was obtained by integration of the stride frequency and total distance was obtained by integration of the instantaneous walking speed.
Validation study walking
The algorithm was validated outdoors on a 4.7km long course consisting of uphill and downhill sections, walking on roads, trails, making a phone call or carrying a bag. The entire walking section was interrupted regularly by short breaks of up to 5 minutes where the subjects remained stationary but were allowed to move their hands freely, for example to drink or to take pictures. In total 29 persons (20 – 65 years, 155 – 195cm) participated in the study. The speed estimation model was trained using the leave-one-person-out procedure.
| Absolute Error | Relative Error, % | |||
|---|---|---|---|---|
| Mean | Std | Mean | Std | |
| Number of steps | -20 | 46 | -0.3 | 0.8 |
| Average Speed, km/h | 0.0 | 0.25 | 1.3 | 5.4 |
| Total distance, m | 43.5 | 235.1 | 0.9 | 5.0 |
Publications
Conference papers
- B. Fasel, F. Dadashi and K. Aminian. Instantaneous walking speed estimation for daily life activity monitoring based on wrist acceleration. 4th International Conference on Ambulatory Monitoring of Physical Activity and Movement (ICAMPAM), Limerick, Ireland, June 10-12, 2015.
- B. Fasel and K. Aminian. Stride-to-stride gait variability in daily life measured using accelerometers attached to the wrist. 4th International Conference on Ambulatory Monitoring of Physical Activity and Movement (ICAMPAM), Limerick, Ireland, June 10-12, 2015.
- B. Fasel, C. Duc and K. Aminian. Stride count and frequency measured with a wrist-worn inertial sensor. 13th International Symposium on 3D Analysis of Human Movement, Lausanne, Switzerland, July 14-17, 2014.