Electroadhesion gripper
For information on our electroadhesion enabled gripper, please go to this page

Artificial muscle-based soft robot arms
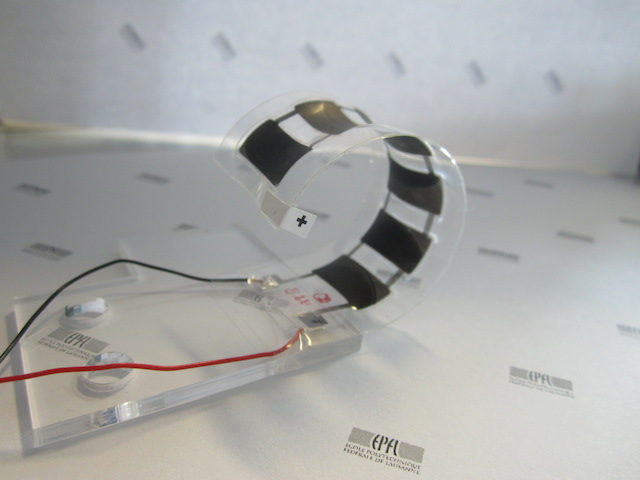 We develop dielectric minimum energy structures (DEMES) as a basic actuator module for soft robotics. DEMES are capable of large actuation stroke, and consist of a dielectric elastomer actuator (DEA, or artificial muscle) bonded onto a flexible frame, which makes it easy to form both simple and complex shapes. By careful choice of materials (i.e., kapton flex-PCB and pad-printed carbon-black PDMS electrodes), it is possible to implement additional functionalities such as sensors onto a frame, making our DEMES intelligent actuators particularly suited for soft robotics.
We develop dielectric minimum energy structures (DEMES) as a basic actuator module for soft robotics. DEMES are capable of large actuation stroke, and consist of a dielectric elastomer actuator (DEA, or artificial muscle) bonded onto a flexible frame, which makes it easy to form both simple and complex shapes. By careful choice of materials (i.e., kapton flex-PCB and pad-printed carbon-black PDMS electrodes), it is possible to implement additional functionalities such as sensors onto a frame, making our DEMES intelligent actuators particularly suited for soft robotics.
Multi-segment grippers
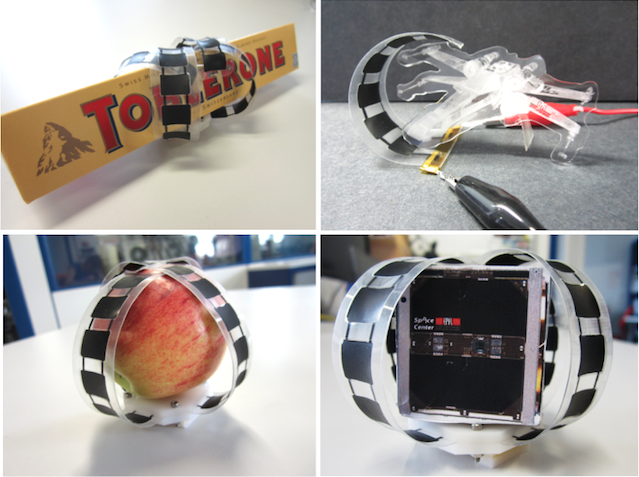
Removing space debris is an increasingly urgent task. One major challenge in this field is grabbing a non-cooperating target, such as a spinning satellite, so as to be able to de-orbit it. We are developing multi-segmented grippers to delicately nab small satellites or debris without creating additional space junk. The major advantages of using compliant polymer grippers are: their relative low weight (meaning that they are cost effect for being sent into space), their flexibility allowing them to be stored in small volumes by rolling or folding, and their conform to the shape of the debris, allowing “octopus”-like grabbing of arbitrary-shaped objects without generating more debris.
more info in our papers: IEEE Transactions on Mechatronics (2015)

Embed of video is only possible from Mediaspace, Vimeo or Youtube
Embed of video is only possible from Mediaspace, Vimeo or Youtube