Towards a flexible motor
In collaboration with the Biomimetics lab from the University of Auckland, New-Zealand, we have developed a flexible motor based dielectric elastomer actuators.
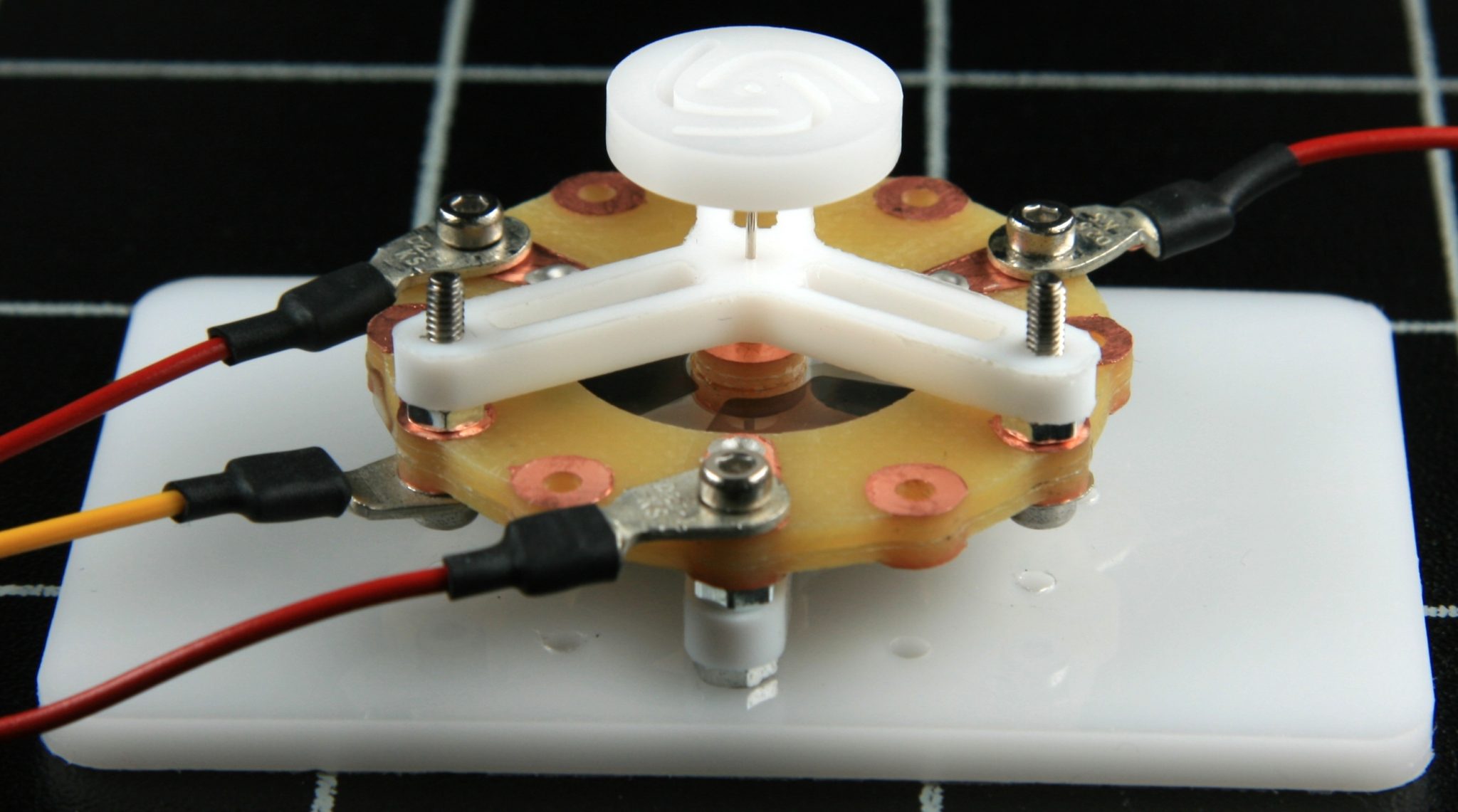
Most of today’s motors are electromagnetic and are consequently made form rigid metallic parts. In contrast, actuators based on elastomers can be bent and deformed without damage, which allows the fabrication of a flexible motor that can be bent while it turns.

We are still far from the completely flexible motor, but our first prototype shows the principle of DEA actuation to obtain a rotating motion from the in-plane expansion of electrodes.
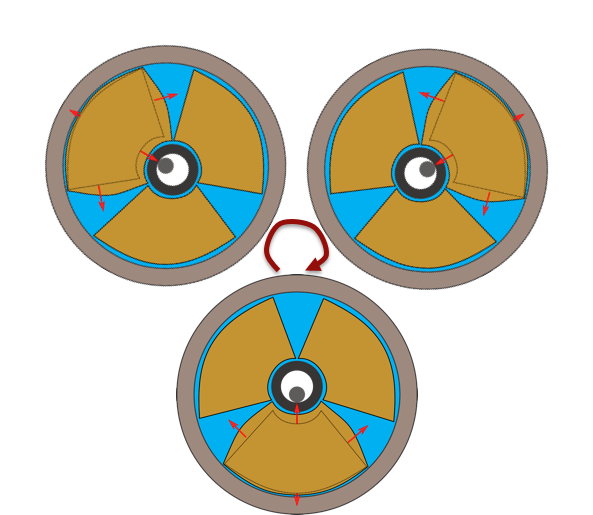 The image on the left shows the activation sequence of the electrodes and the displacement of the orbiter caused by the electrode expansion.
The image on the left shows the activation sequence of the electrodes and the displacement of the orbiter caused by the electrode expansion.
The next step of this project consists in replacing the rigid components of the demonstrators by flexible alternatives. For instance, the rigid FR-4 frame will be replaced by a flexible polyimide PCB and its size will be reduced for further miniaturization.
Characterization of speed and torque is underway, as well as an optimization of the electrode shape in order to improve the motor’s performance.
Embed of video is only possible from Mediaspace, Vimeo or Youtube