A. Wearable haptics (our main focus)
We develop both kinesthetic and cutaneous haptic devices, for gloves and use of any body location.
A1. Soft wearable electrostatic clutch for gloves for VR applications, offering a highly realistic sense of grasping virtual objects by incorporating a thin-form factor clutch on each finger. Our first version was DextrES (a collaboration with ETHZ-AIT). We have since developed textile based glove and sleeve format variable stiffness clutches.

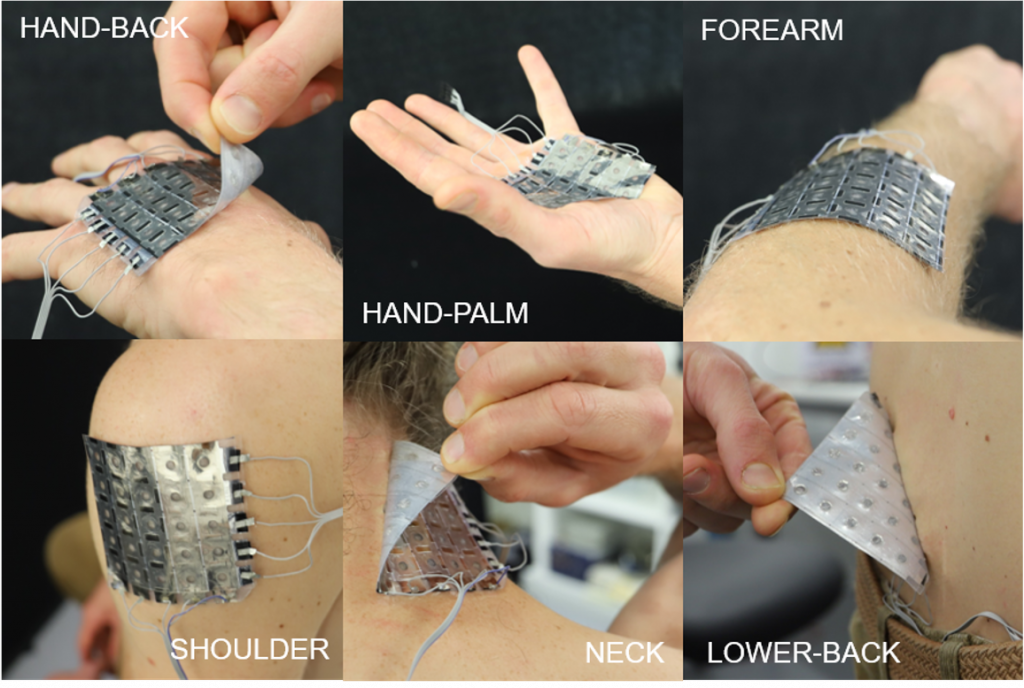
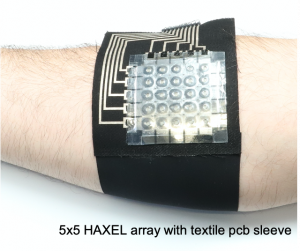
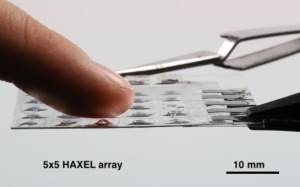
A2. HAXELS: Hydraulically Amplified Electrostatic Actuators for Wearable Haptics, proving 60% strain at over 100 Hz in a flexible matrix format.
 |
 |
A3. Wearable haptics based on ultra-thin DEAS , with 18 µm thick DEA directly on fingertips.
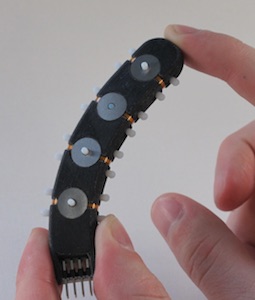
A4. Flexible arrays of EM taxels: in collaboration with ETHZ-AIT, we have developed Magtics: flexible wearable arrays of EM taxels for on-body notification, VR, and adding haptics to everyday objects as well as Tactiles.
 |
 |
B. High-resolution haptic displays (older work)
Portable and rapidly refreshed haptic displays would enable visually impaired users to use their sense of touch to interact with data, collaborate remotely, navigate easily in new environments. While similar to a Braille display, the pitch and speed are tuned to display dynamic graphics rather than text.
We develop haptic displays based on several technologies:
- Shape Memory Polymers (SMP),
- Latching ElectroMagnetic actuations (EM),
- Dielectric Elastomer Actuators (DEA).
Our emphasis is on scalable approaches to enable large-area dense arrays of high-force large-stroke taxels to convey information by sense of touch for new user interface paradigms.
B1. Electromagnetic (EM) actuation
Large arrays of EM taxels: Our 12×16 latching EM haptic display consists of a matrix of small magnets held between two printed circuit boards (PCBs). A 3D printed interface is mounted on the magnetic actuators to provide a smooth and comfortable user experience. More info and movies of our rigid EM haptic devices
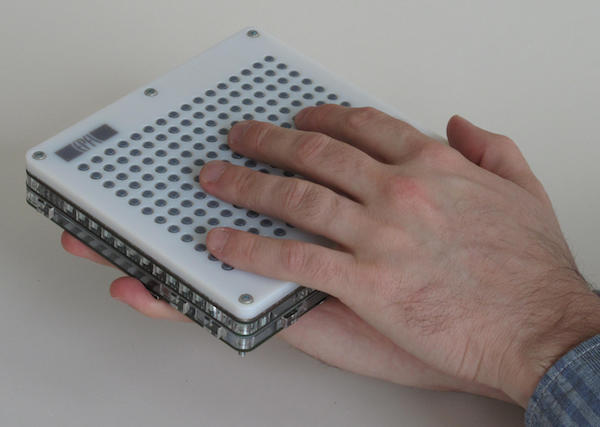
a wireless 12×16 (192) array of taxels driven by an array of electromagnetic actuators. 10 ms switching time allows very fast updates
B2. Pneumatic actuation with Shape Memory Polymer (SMP) latching
We combine a single pneumatic source with a low-voltage adressable matrix of Shape Memory Polymers (SMPs) taxels to create an array of latching taxels with excellent holding force (over 400 mN). A 24×32 array is shown below. More info on our SMP haptics devices
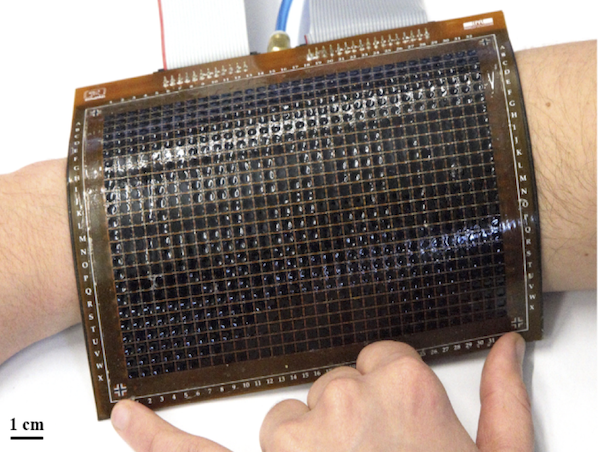
24×32 (768 taxel) haptic display based on SMP+pneumatic drive on a 4mm pitch
B3. Matrix of Dielectric Elastomer Actuators with integrated flexible 1 kV TFTs
We have developed a novel way to control a matrix of DEAs by integrating flexible high-voltage thin film transistors (TFT) with each DEA. We can thus benefit from the impressive performance of DEAs as compliant actuators, while using one a single high voltage power supply for the whole display, achieving independent control of each DEA taxel by applying 30 V to the gate of its associated TFT. See the Advanced Materials paper.
