Contact detection
At the LSMS we are constantly searching for improving on existing numerical algorithms. Ongoing research focuses on efficient means to determine contact. A three-level contact detection system is envisioned, where finite element meshes are approximated using hierarchies of bounding volumes for the contact detection. The following figures show the construction of the bounding volume hierarchy from the mesh of a motorcycle.
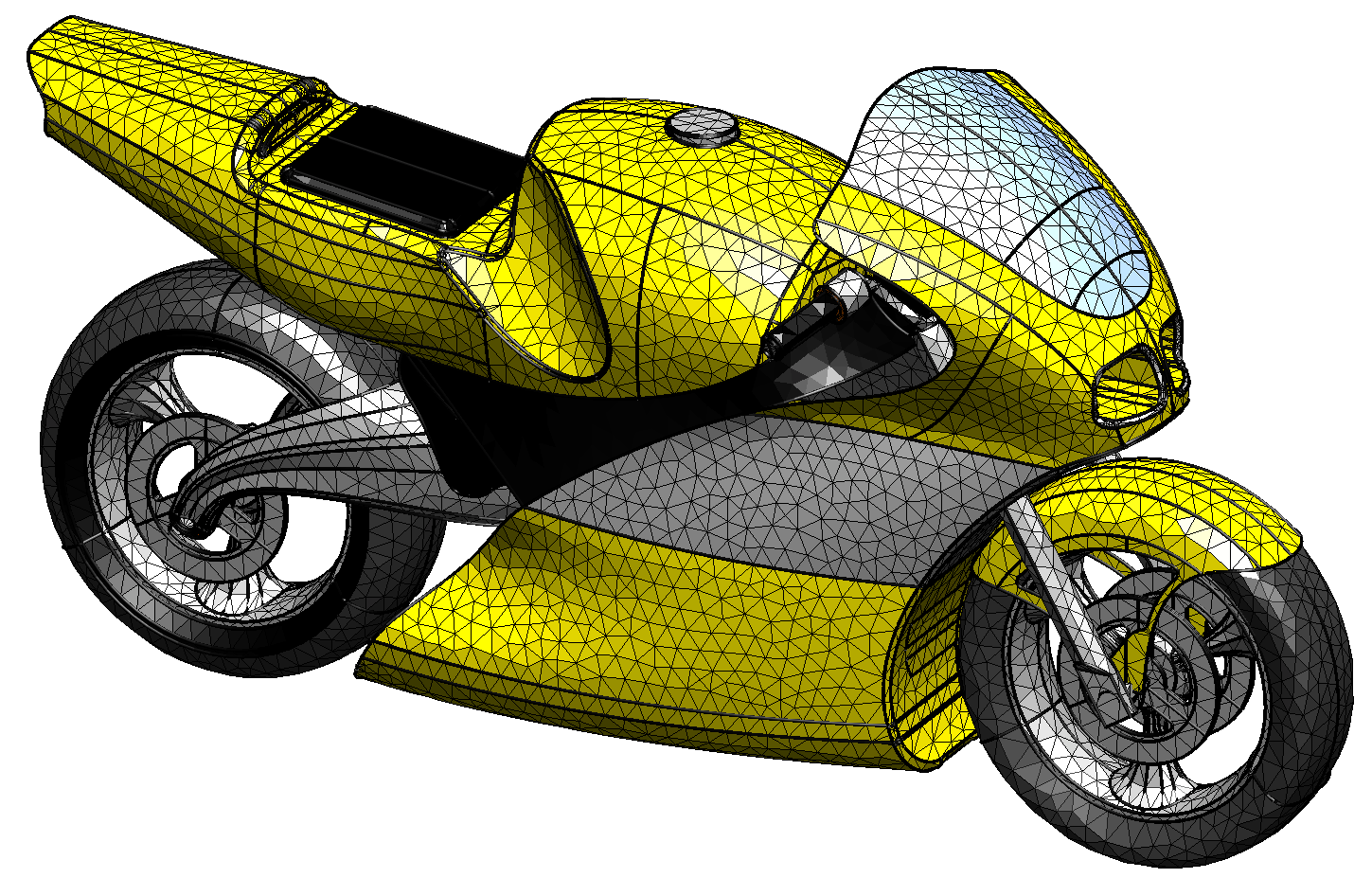 |
| Finite element mesh |
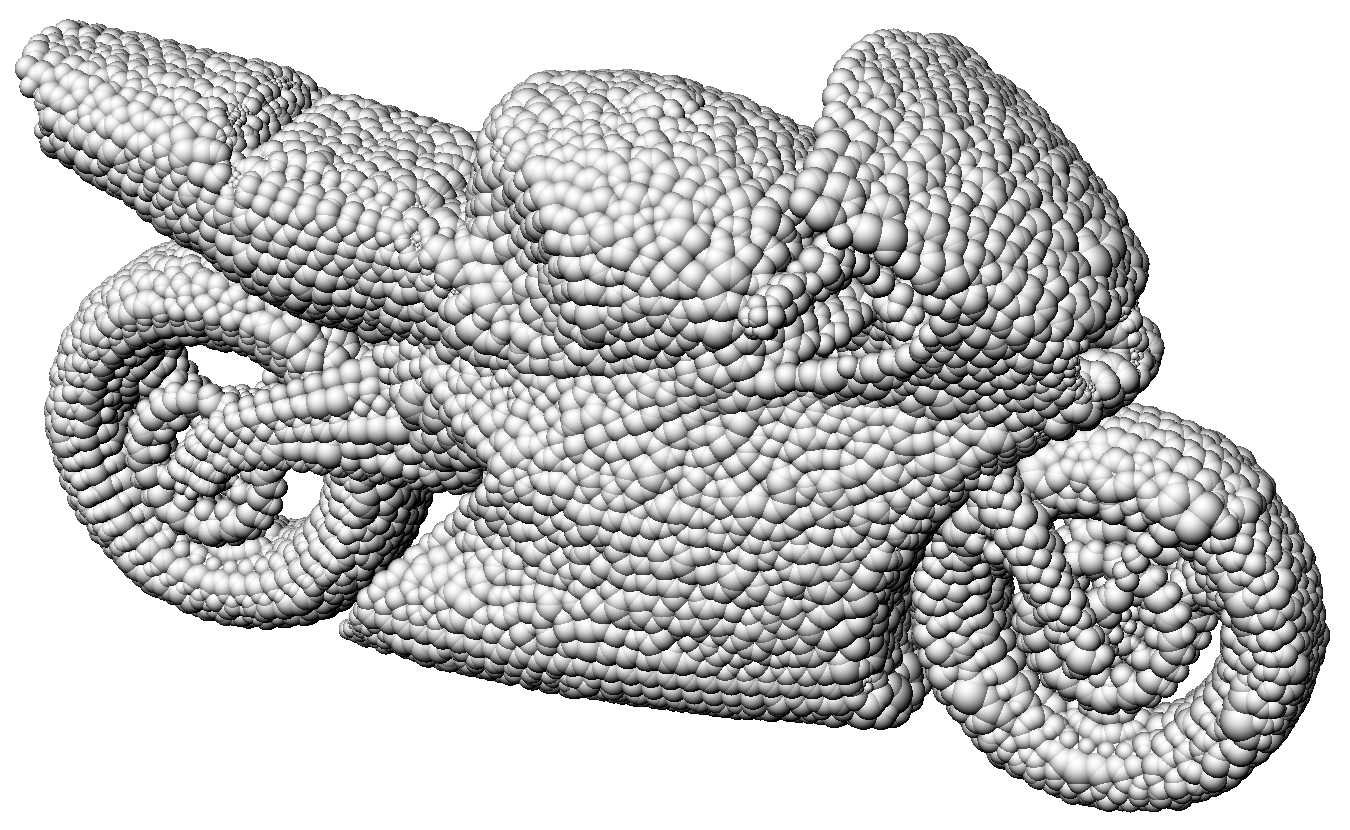 |
| Leaf bounding sphere representation |
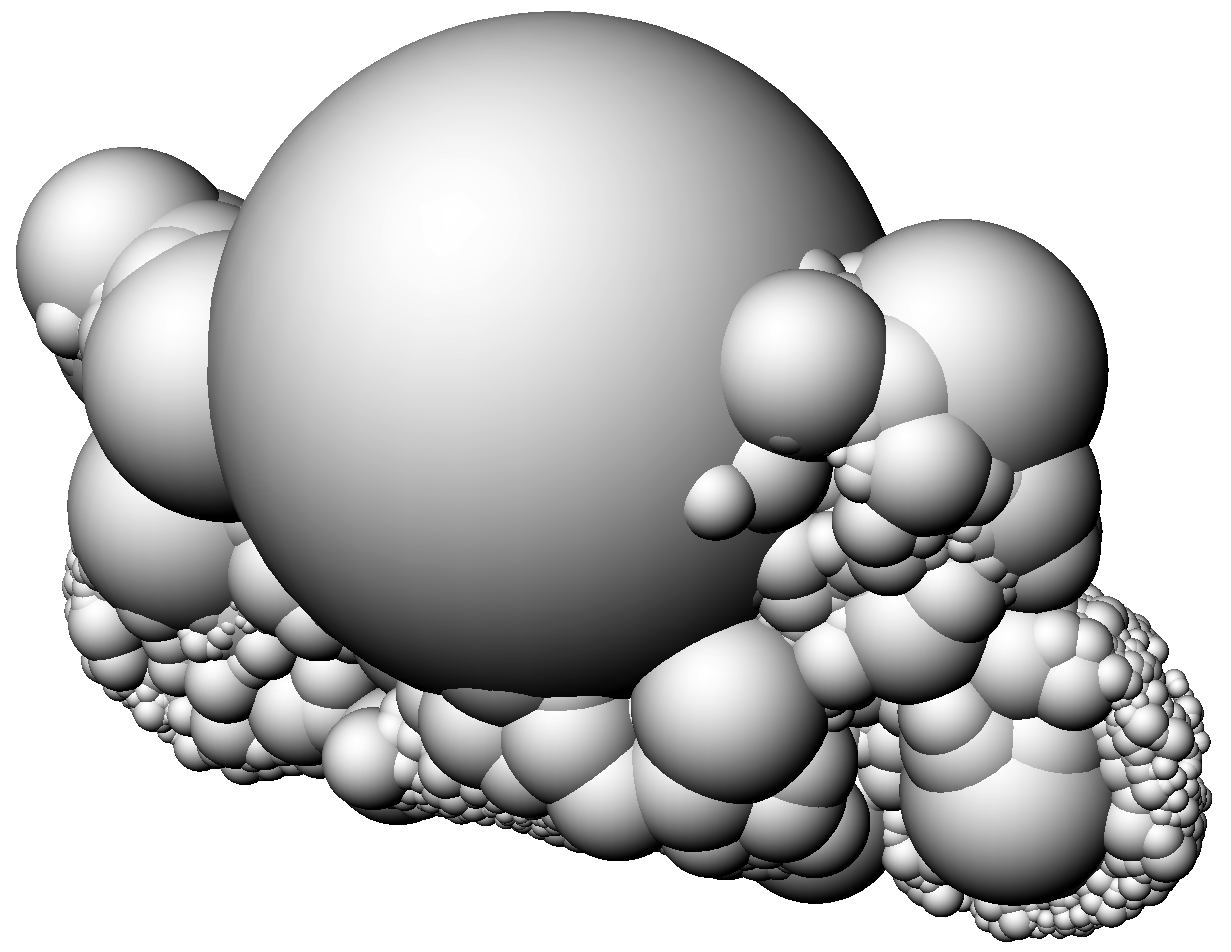 |
| 12th level bounding sphere representation |
|
|
| hierarchical representation |
Bounding volumes are then used to quickly discard bodies that do not interact. When contact is imminent, hierarchies are traversed down for a more detailed contact detection. The previous example shows the hiearchical construction using bounding spheres. Nevertheless, other bounding volumes can be used, as illustrated below for the finite element model of a jet using axis-aligned bounding boxes for the hierarchy.
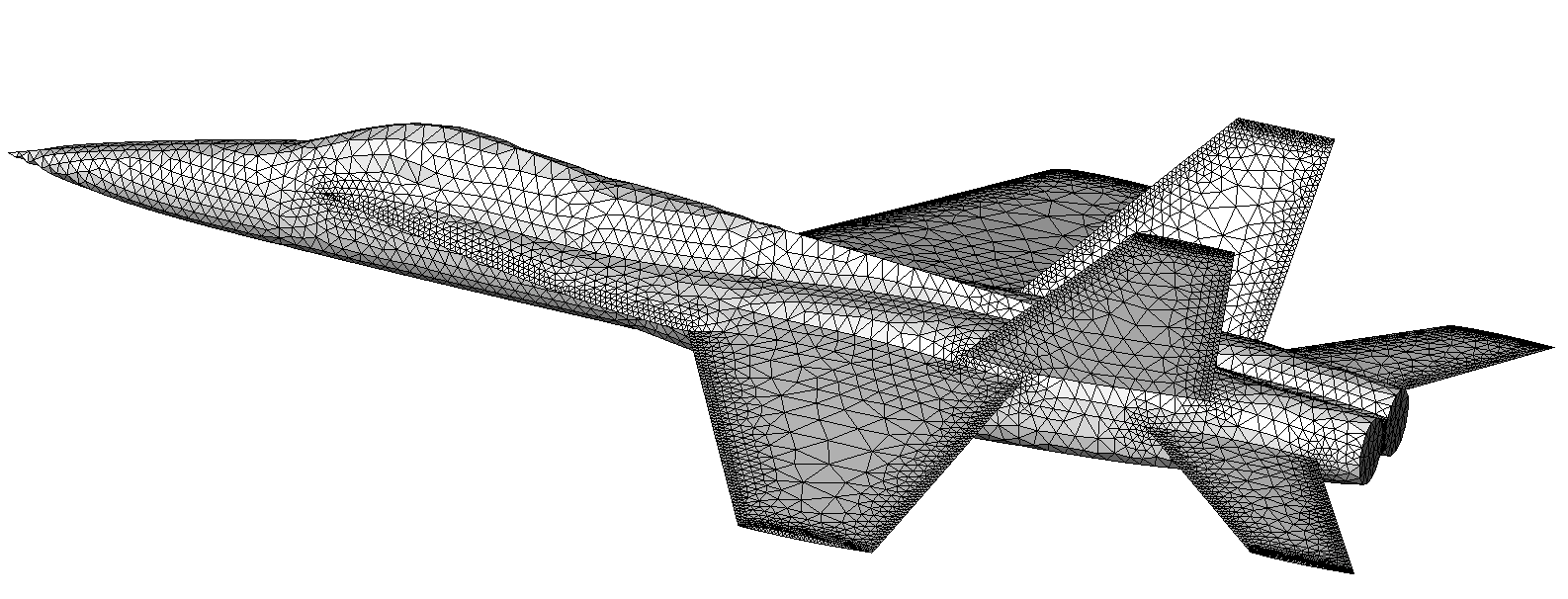 |
| Finite element model of a jet |
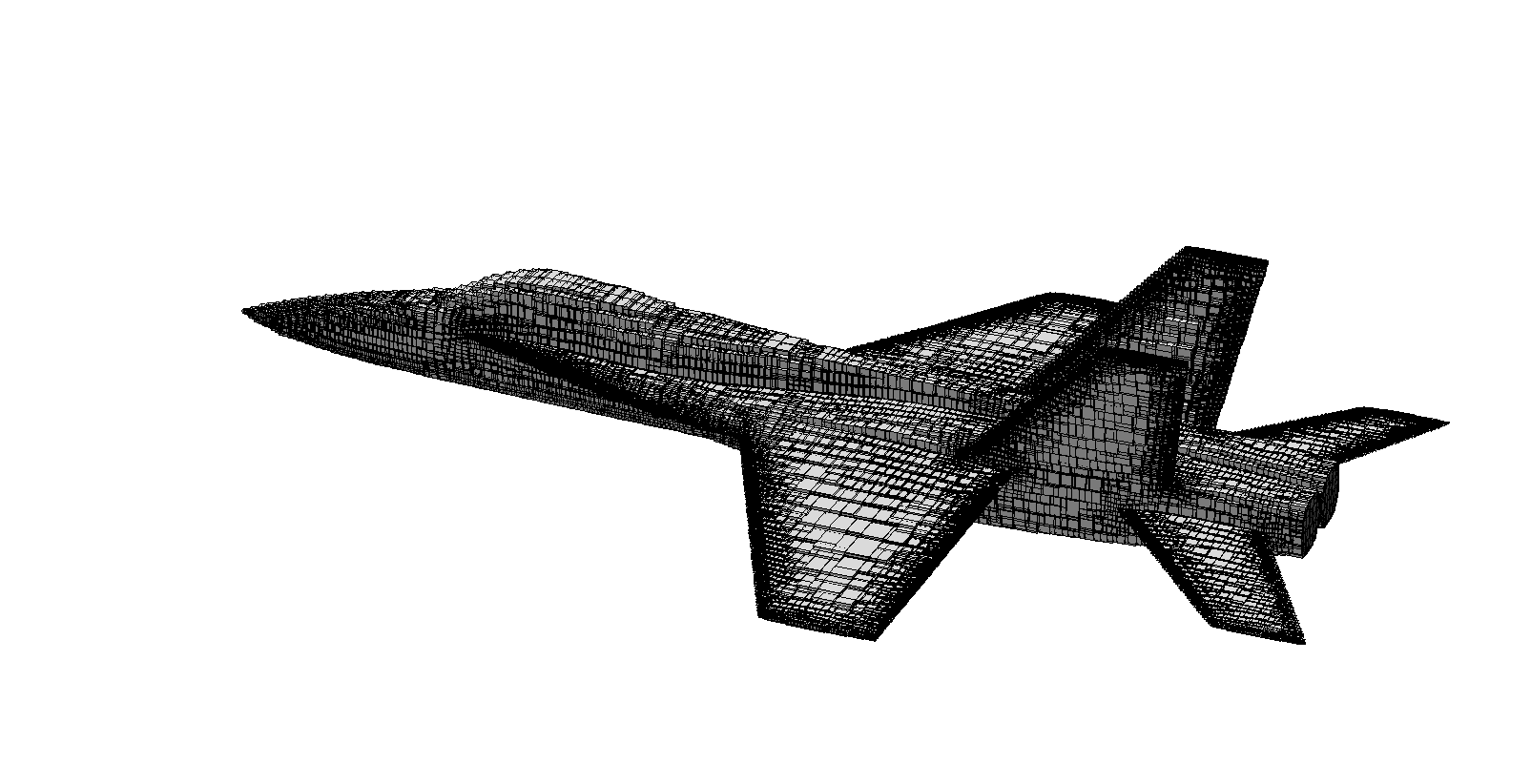 |
| Leaf representation using axis-aligned bounding boxes |
|
|
| hierarchical representation |
