 |
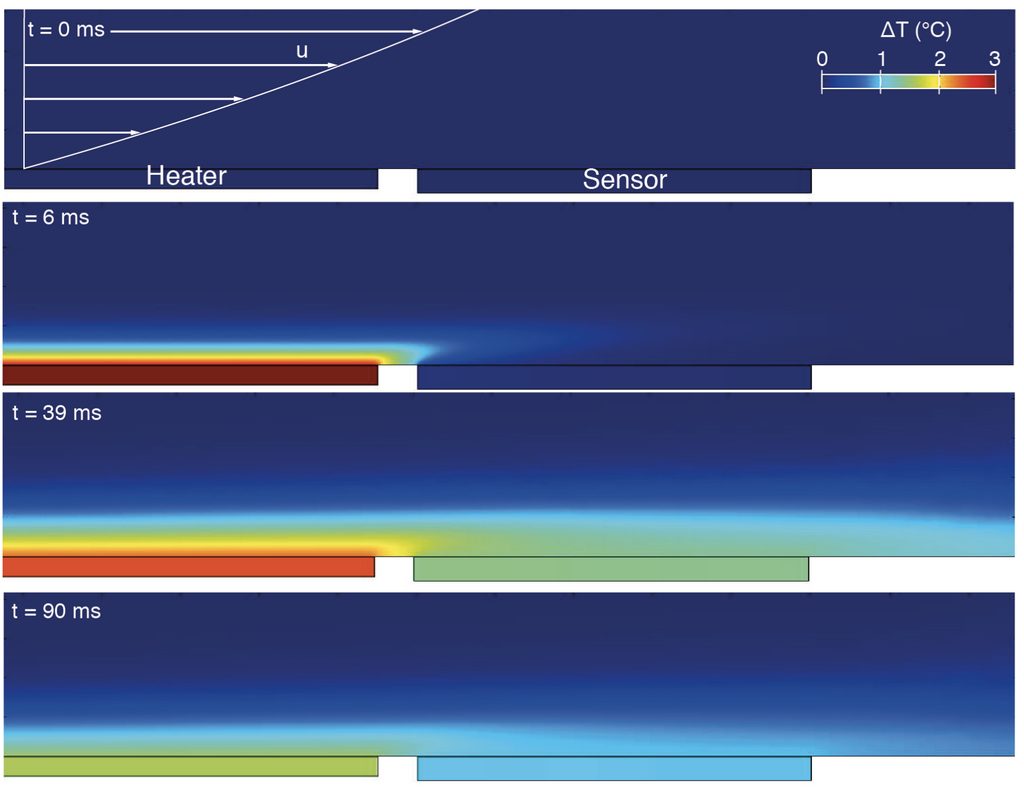
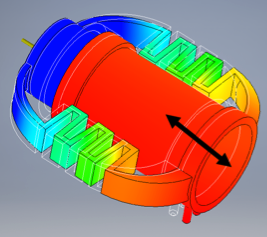
Ability to measure physiological parameters with endovascular technologies can be helpful in both fundamental science and translational medicine. In this project, a multiphysics simulation software (COSMOL) was used to capture the working principle of a microengineered endovascular thermal flow sensor. The heat front generated by an upstream thermal heater is naturally transported downstream and detected by a downstream resistive sensor. Small Reynold number regime imposes taking into account the microfluidic properties of the flow, namely, the shape of the velocity profile |
Vincent de Poulpiquet, Semester project, Spring 2020
Supervisor: Lucio Pancaldi
 |
Ability to safely and quickly deploy functional microprobes in the endovascular system holds great promises in interventional radiology and fundamental science. However, current catheterization techniques face fundamental limitations in miniaturization, which greatly limits the accessibility to the target tissue. In our lab, we developed an ultra-small microprobe that can be magnetically navigated in vessels as small as 0.1mm. The aim of these projects was to study the embedded functionalities of such devices by equipping them with mechanical end effectors and electronic circuits. |
Konstantinos Ragios, Semester project, Spring 2019
Fatemeh Farsijiani, Semester project, Fall 2019
Eléonore Cauquil, Semester project, Spring 2020
Alaa Rushdy, Semester project, Spring 2020
Rémy Treyvaud, Semester project, Spring 2020
Supervisor: Lucio Pancaldi
 |
The wireless actuation capabilities of magnetic field have been widely used. Recent advances in microfabrication of magnetically responsive soft materials have opened new frontiers in micrometer-sized wireless actuated mechanical systems. In this line of thinking, the aim of this project was to numerically and experimentally validate the performances of a sub-mm fluidic pump that can be externally controlled through a set of electromagnetic coils. |
Brooke Zampell, Semester project, Fall 2019
Supervisor: Lucio Pancaldi
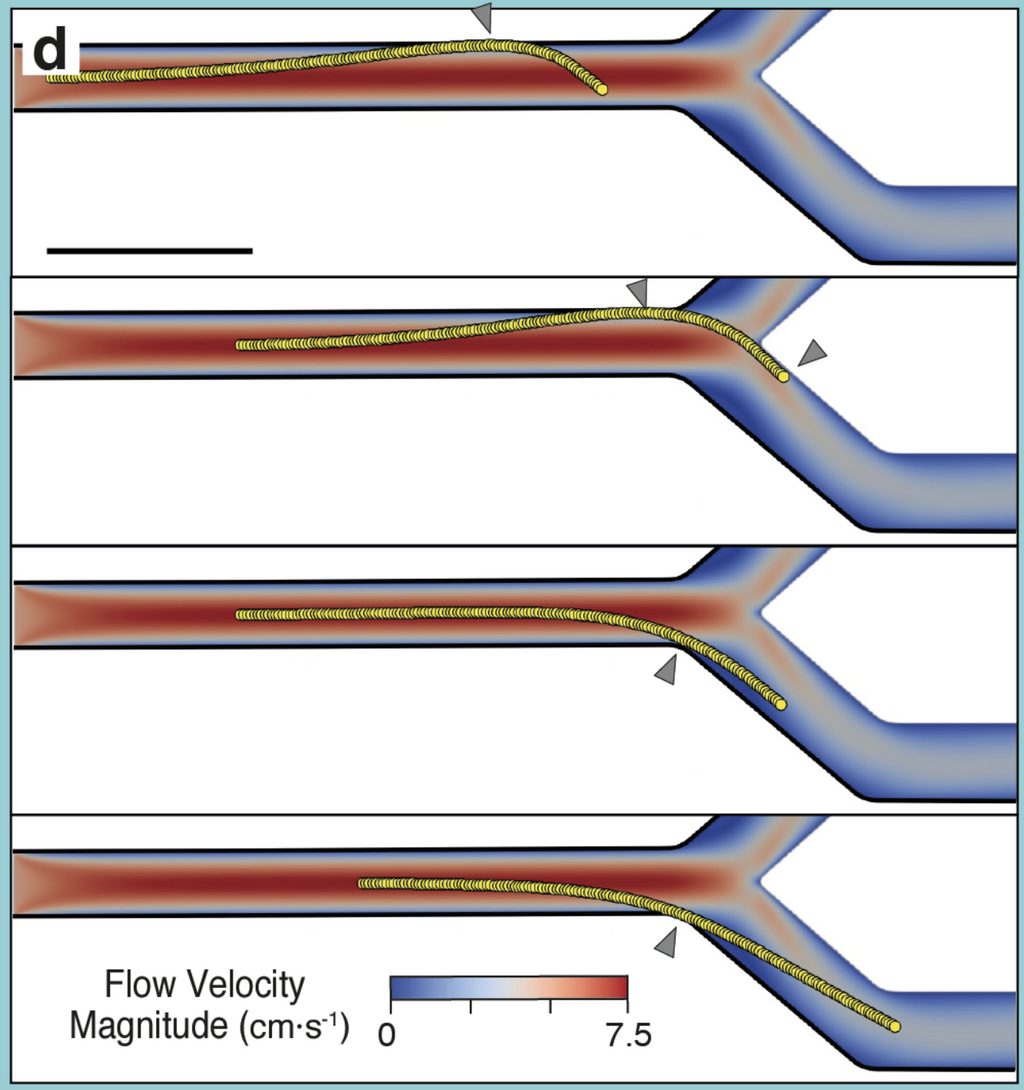 |
Safe and efficient deployment of endovascular catheters is currently a major challenge in interventional radiology. The push forces applied by the surgeon to advance the endovascular devices may lead to several complications and the success of the operation considerably relies on the ability to interpret the feedback on the insertion forces. This project aimed at simulating the fluid-structure interactions between a deployable flexible microprobe and the viscous stresses exerted by the blood flow, to develop a new generation of microprobes able to easily navigate with the help of magnetic fields, in micro-vascular systems down to 0.1mm in diameter. |
Pietro Dirix, Master thesis, Fall 2018
Matthieu Trupin, Master thesis, Fall 2020
Supervisor: Lucio Pancaldi
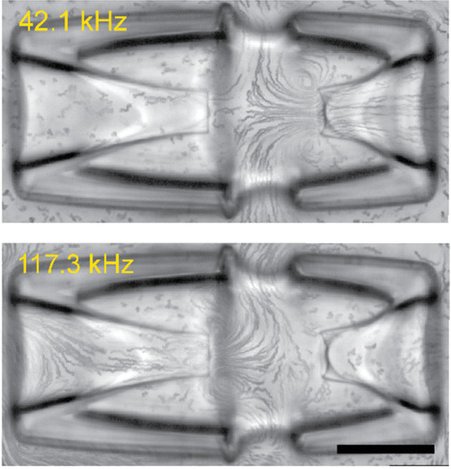 |
A design, manufacturing, and control methodology is presented for the transduction of ultrasound into frequency‐selective actuation of multibody hydrogel mechanical systems. The modular design of compliant mechanisms is compatible with direct laser writing and the multiple degrees of freedom actuation scheme does not require incorporation of any specific material such as air bubbles. Finite element analysis and computational fluid dynamics are used to quantitatively predict the performance of acoustically powered hydrogels immersed in fluid and guide the design process. The potential of the presented technology for minimally invasive diagnosis and targeted therapy is demonstrated by a soft microrobot that can on‐demand collect, encapsulate, and process microscopic samples. |
Moises Vazquez Ramirez
Supervisor: Murat Kaynak
Semester project, fall 2019
Reference Paper: https://doi.org/10.1002/advs.202001120
 |
Lorentz forces are widely used in daily life machines and sensors, such as electric motors, particle accelerators and hall sensors. In this project, the possible use of revisited small-scale electromagnetic actuators was studied, aimed at being integrated in autonomous and wirelessly powered microrobots. The electric current source driving the embedded electromagnetic coil was provided by external radiofrequency (RF)-based inductive coupling and the actuation was performed with a micromagnet. |
Jian Yang
Master thesis, spring 2019
Supervisor: Lucio Pancaldi
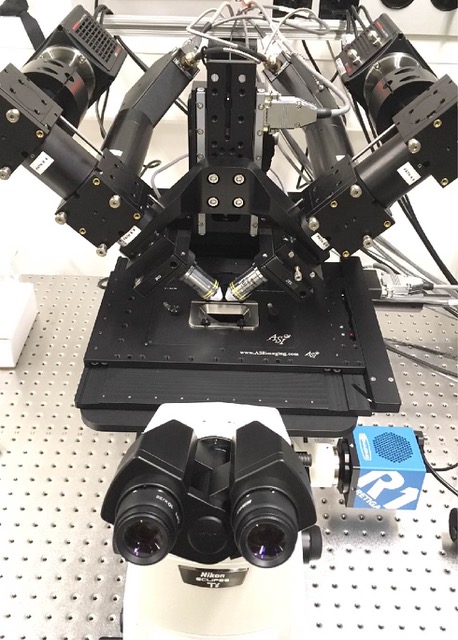
In this project, we developed a robotic surgery platform inspired by state-of-the-art ophthalmic surgery systems. The robot consists of a 6-DOF custom-designed piezoelectric micormanipulator, 3D-printed adapters, and a tiny DC motor driven by a microcontroller for actuating tools such as scissors and forceps. We developed a series of GUIs based on LabView, MATLAB and Micromanager software. The adapter went through multiple optimization iterations for the minimization of vibrations and fine tool control.
Jon Märki, Carla Nannini, Alexandre Bortoli, and Lenny Dupourque
Supervisors: Erik Mailand and Matthias Ruegg
Internship as well as Semester and Masters Thesis Projects, Fall 2016 – Fall 2020
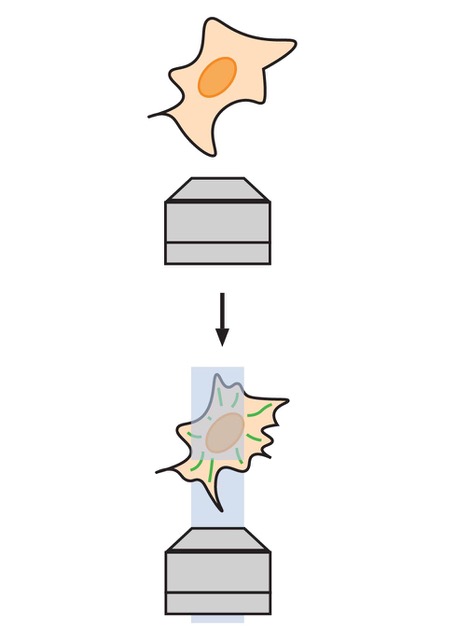
In this project, we spatiotemporally control cell mechanics to sculpture engineered three-dimensional biological tissues. Using robotic microsurgery and a programmable light projector we locally manipulated cells and subsequently followed the morphological state of the tissue. To investigate and quantify the underlying mechanism of 3D deformation, we also worked with engineered epithelia monolayers. The project involved mammalian cell culture, tissue engineering, robotic manipulation, time-lapse microscopy, and image processing.
Odysseas Chaliotis, Pablo Guilland, Ece Su Ildız
Supervisor: Erik Mailand
Internships and Semester Project, Spring 2019 – Fall 2020

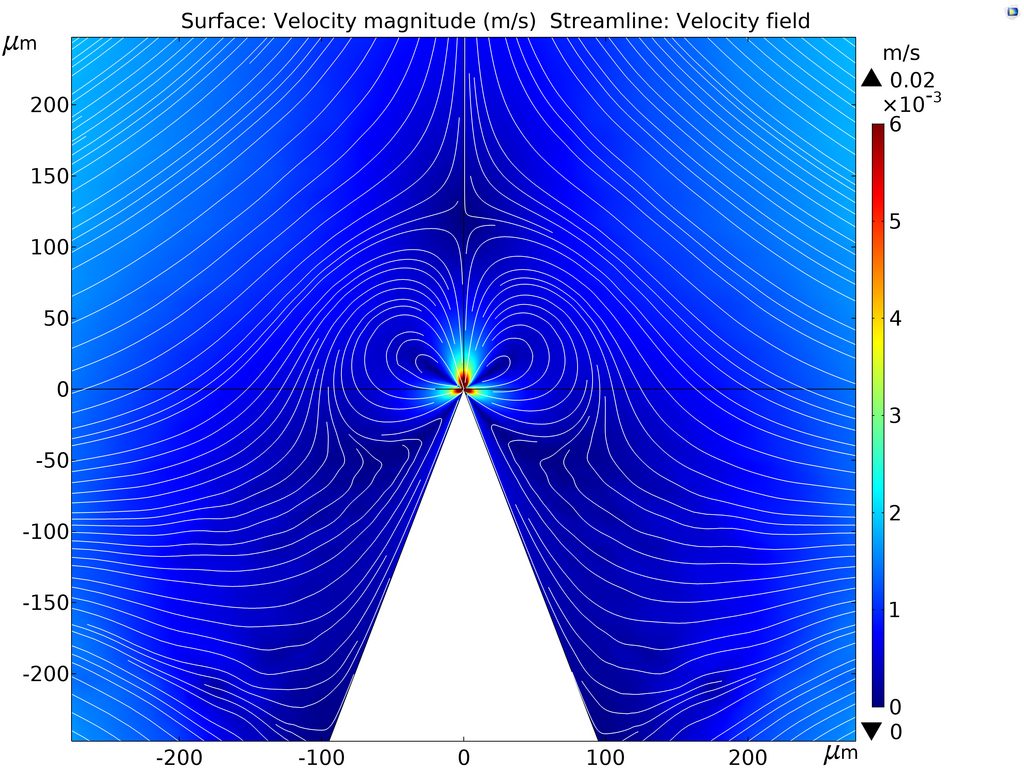
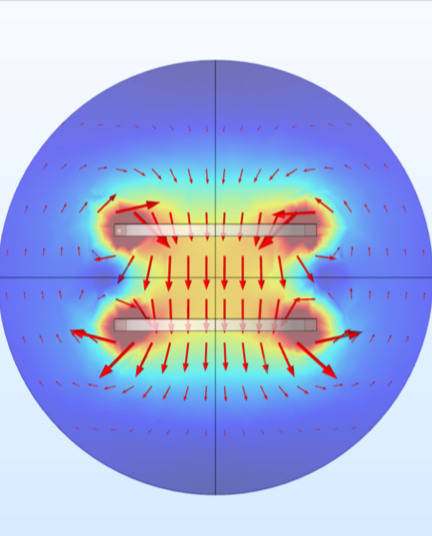
The project’s goal is to study the forces acting on small particles in acoustic fields, in order to design tools to manipulate them. Due to the nonlinear nature of the forces, numerical simulations were preformed using a commercial FEM software – COMSOL Multiphysics. The obtained results were analyzed to gain insight on how various parameters such as geometry and frequency influence the generated forces. The 2D and 3D simulations of the acoustic streaming generated by a vibrating sharp edge in fluid enabled us to estimate the particles trajectories and trapping regions.
Vincent de Poulpiquet
Supervisor: Amit Dolev
Internship, Fall 2020
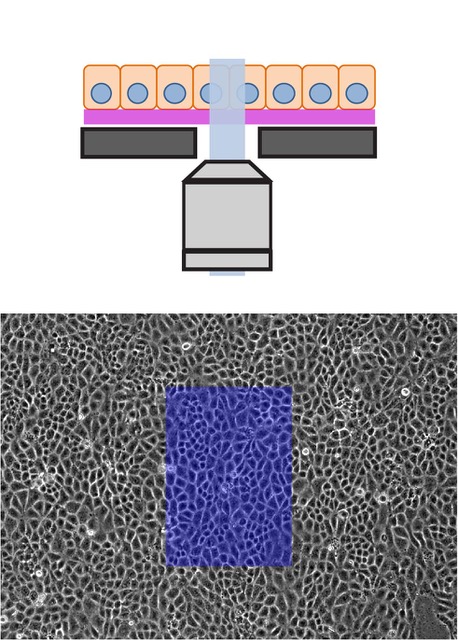 |
The main goal of the project was to spatiotemporally control cell mechanics to sculpture engineered three-dimensional biological tissues. To investigate and quantify the underlying mechanism of 3D deformation, we worked with engineered epithelia monolayers. Using a programmable projector, we locally manipulated cells and subsequently followed the morphological state of the tissue. The project involved mammalian cell culture, tissue engineering, time-lapse microscopy, and image processing. |
Ece Su Ildız
Supervisor: Erik Mailand
Internship, Summer 2019
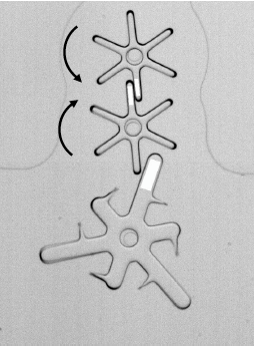 |
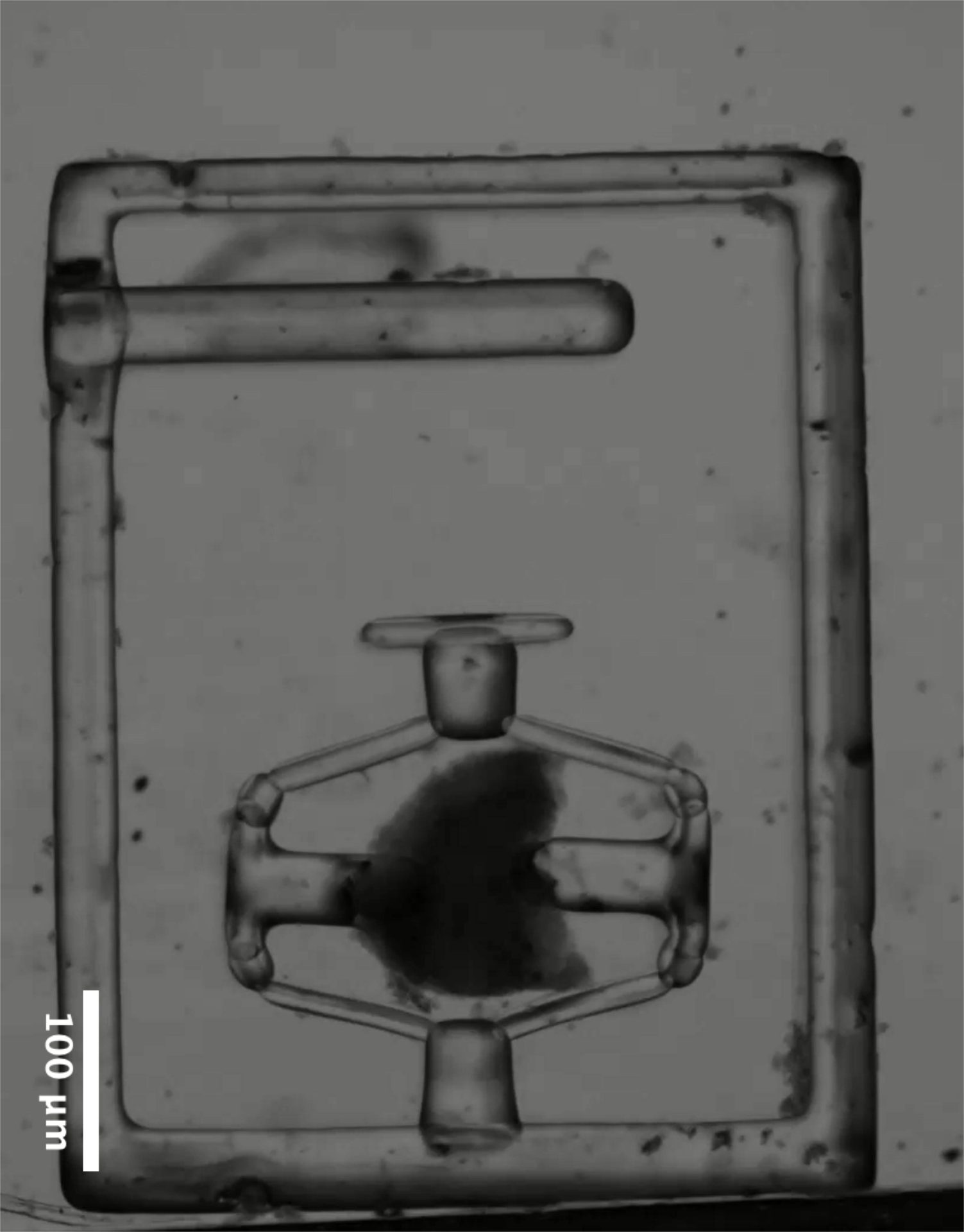
In this project, we worked on the design, fabrication, and operation of compound micromachines powered by acoustic streaming. The machine components were directly incorporated around pillars serving as shafts without further assembly steps using a single-step in situ polymerization process controlled by a programmable projector. Two strategies were presented for harvesting acoustic energy using sharp-edged structures. The first method is based on on-board pumping of fluids and the second method involves engineering of rotors (image on the left). The implementation of these strategies resulted in the construction of microscale turbines and engines that can be coupled to gear trains for adaptable transmission of mechanical power. |
Supervisor: Murat Kaynak
Semester project, Spring 2018
 |
In this project, the objective is to get a proof of concept of a compliant micro-mechanism that exerts a unilateral force on a biological cell cluster. With the displacement of a cantilever, against which the cell cluster is compressed, one should be able to measure the mechanical properties of the sample. The mechanism is comprised of a photopolymerizable hydrogel, PEGDA, and microactuators. These actuators are an assembly of polymer coated gold nanorods that can be actuated by a laser at the plasmonic resonance frequency of the nanorods. We developed a mechanism that provides a displacement of the pushing beam of 100 micrometers, which is high enough for testing. |
Daniel Reichmuth
Supervisor: Raquel Parreira
Semester project, Spring 2019
 |
Micrometer-resolution additive manufacturing relies on the precise positioning and displacing of the dispenser tip. In this project, a C-based software was developed to precisely and automatically calibrate and move a 3DoF piezo linear positioner given an input design. The positioner was further integrated with an imaging and extrusion system in order to extrude a conductive silver-based paste for manufacturing microwires. The conductive microwires can then be deposited on a flexible substrate, such as PDMS, to fabricate flexible and implantable electronic devices. |
Alex Horvath
Supervisor: Lucio Pancaldi
Semester project, Fall 2017
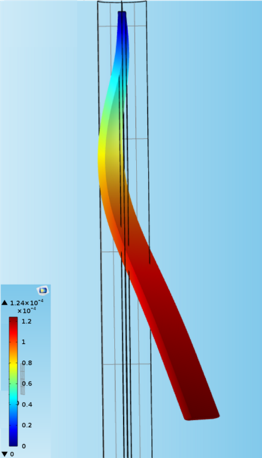 |
The aim of this project is to theoretically examine the deformation of a flexible, ribbon like micro-scale flagella motivated by the bacteria locomotion via its helical flagella. Due to its elastic/soft structure initially straight rod like flagella undergoes to a non-linear deformation and coils by the interplay of hydrodynamic loading and elastic forces. At micro-scale viscous loading coming from fluid dominates the inertia and micro-swimmer moves in low-Reynolds number known as Stokes regime. To examine the interplay, we have combined resistive force theory and finite element method. |
Ece Ozelci
Supervisor: Fazil Emre Uslu
Semester project, Spring 2017
 |
To study insect colony behavior in organizational level, it is required to identify different individuals with their age and task in the colony. In this project, we worked on a design of a tool/platform, where we can store all the required information of an individual throughout the experiments. The tool must be resilient to damages, which may come from other individuals or the chemicals released from the ant body. Finally, we have designed 3D printed belt rings for ants to decode the information about their age, task, and colony. |
Mohamed Boudokhane, Julie Veya, Philipp Goldlin
Supervisor: Fazil Emre Uslu
Bachelor thesis project, Spring 2017
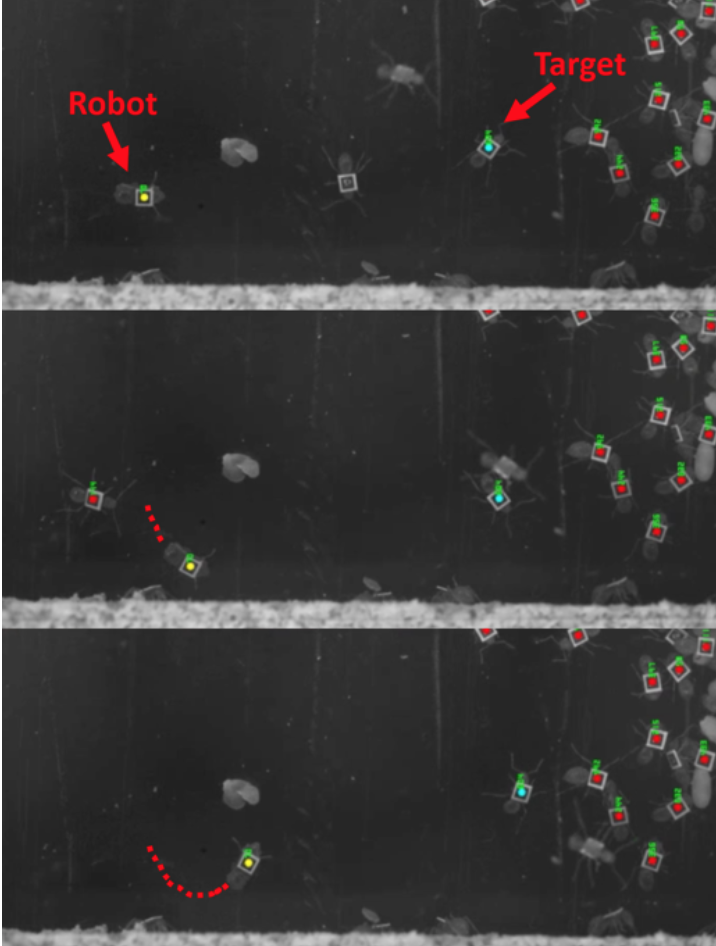 |
We aim to develop an algorithm to navigate a robotic ant in the colony to interact with the other ants as they do in the colony. Interactions in the colony leads to information transfer between individuals and is crucial for task allocation. The algorithm takes input from a tracking system and generates a path for the robotic ant to its target ant or location. The path is updated every second to avoid any collision since the ants are always moving within their nest. The algorithm enable us to safely navigate the robotic ant without disturbing the nature of the colony. |
Benjamin Alexis Fuhrer
Supervisor: Fazil Emre Uslu
Internship, Summer 2017
 |
We aim to develop a magnetic manipulation system to actuate magnetic objects embedded into biological systems. The system is designed in a way that it can be integrated to a motorized inverted microscope, which allow us to do time-lapse experiments. For generating strong uniform magnetic fields, multiple magnets are arranged in a certain way and they are controlled by a rotary robotic manipulator. The manipulator can be programmed to perform automated tasks with a MATLAB user interface. |
Mohamed Boudokhane
Supervisor: Fazil Emre Uslu
Internship, Summer 2017
 |
The main goal of this project was to set up a light sheet microscopy in the laboratory to study three-dimensional (3D) shape evolution of biological microtissues after mechanical perturbation. For 3D imaging we worked with a dual-view inverted selective plane illumination microscope (diSPIM). We setup the calibration and imaging protocols as well as processing of acquired images for deconvolution. The system was successfully utilized to acquire time-lapse images of nuclei within a 3D morphing microtissue. |
Quentin Wannebroucq
Supervisor: Erik Mailand
Masters ThesisProject, Spring 2018
 |
Understanding how diseases spread can inform decisions on who most needs inoculation against a disease to minimize its spread. Of particular interest is the idea of “super spreaders”, individuals in a network that are most influential in spreading a disease to the greatest numbers of other members. The aim of the project is to develop an algorithm, which can evaluate the interactions in the colony to detect the individuals who has more potential to spread disease or chemicals in the colony. Centrality measures were used to detect the individuals. After detecting the individuals, the algorithm is able to feed the information for any stimulation mechanism. |
Bryce Kenyon Burgess
Supervisor: Fazil Emre Uslu
Semester Project, Fall 2017
 |
In this project, we aim to develop a wirelessly actuated mechanism, which can interact with living ants to study social organization in ant colonies. The stimulation mechanism behaves like an ant antenna and is designed to be integrated onto a mobile robotic ant. The mechanism is non-invasively actuated by electromagnetic coils, which are attached to robotic manipulators located out of experimental arena. As a result, the mechanism is capable to apply different tactile signals with varying frequency and amplitude depending on the signal required for the scenario in the experiment. |
Unal Emre Gaznepoglu
Supervisor: Fazil Emre Uslu
Bachelor Thesis Project, Spring 2018
 |
In this project, we aim to develop a platform to manipulate the temperature of the ant nest’s ground. By changing the temperature, it is possible to change the location of certain group of ants in the colony. The design of the platform required the knowledge of thermodynamics and fluid mechanics, and involved designing printed circuit boards, programming the model-predictive controller and machining mechanical parts. The platform was successfully designed and assembled. It is capable of changing temperature in minutes and sustain the temperature pattern for months. With this non-invasive method of changing the social structure of the colony, we are now able to study mysteries of ant social organization. |
Radu Constantin Martin, Christoph Andreas Ungricht, Leonard Ziegler
Supervisor: Fazil Emre Uslu
Bachelor Thesis Project, Spring 2018
 |
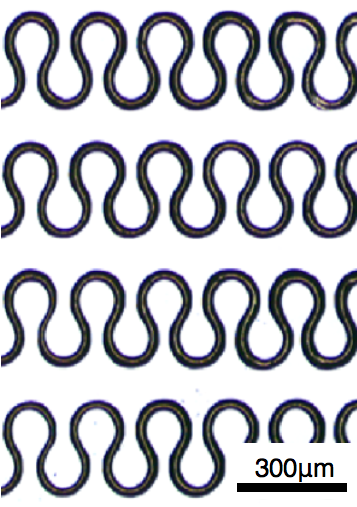
In this project, we fabricated and tested an untethered flexible electronic implant for neural stimulation. The device comprises of an on-board antenna for harnessing electromagnetic power and a serpentine-shape printed wire embedded in a flexible elastomer that heats upon application of electrical current. The deposition of silver-based paste was performed with a custom-made 3D printing system involving a pneumatic dispenser and a computer-controlled linear positioner. The heater successfully reached more than 70°C in just a few seconds and at a few cm distance from the electromagnetic emitter. |
Omar Benjelloun
Supervisor: Lucio Pancaldi
Semester Project, Spring 2018
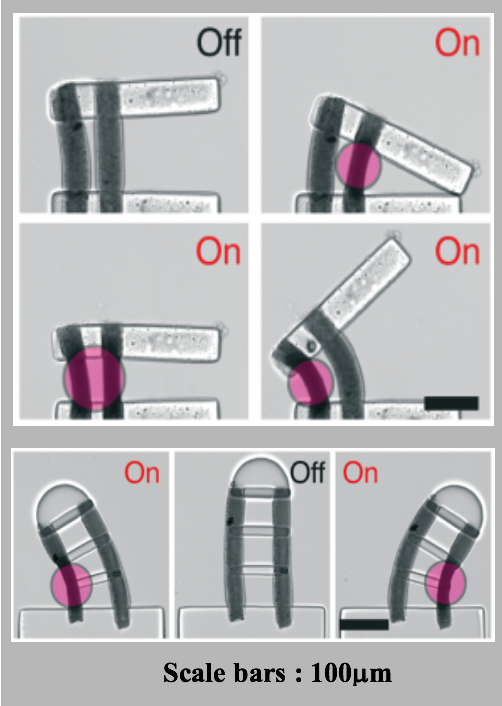 |
In this project, we aimed to create active micromachines that can be wirelessly actuated. In particular, we focused in creating microgrippers fully made out of hydrogel that could display dexterous grasping capabilities as well as agonist-antagonist contraction-relaxation behaviour, such as found in skeletal muscles. In order to achieve that, several techniques to shape photo-responsive hydrogels were investigated. The final integration with a passive hydrogel structure, photopolymerized under the microscope, allowed creating microgrippers and continuum microrobotic arms. |
Ismael Trouiller and Lea Hinzelin
Supervisor: Lucio Pancaldi
Internship, Summer 2018
 |
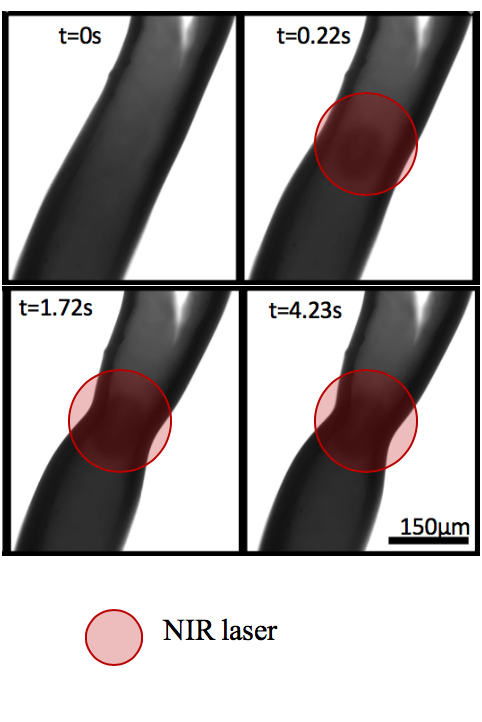
While standard actuators are very efficient and controllable at the macroscale, they exhibit fundamental limitations at the microscale. Prohibitive weight, fabrication issues and mechanical mismatch with surrounding soft tissues are just a few examples highlighting the challenges in miniaturizing existing actuators. To address this issue, we developed a soft optomechanical microactuator that can be wirelessly actuated using Near Infrared (NIR) light in just a milliseconds. The soft actuators were then embedded in microstructures that were fabricated using 2-photon polymerization (Nanoscribe) in order to obtain highly addressable dexterous machines. |
Federica Montrone
Supervisor: Lucio Pancaldi
Semester Project, Fall 2018
 |
In this project we wanted to integrate soft optomechanical actuators made of gold nanorods and thermoresponsive hydrogel, with photopolymerizable passive elements. The ability of gold nanorods to efficiently transduce light into mechanical effort, can be exploited to create simple yet sophisticated micromachines that can be wirelessly and quickly actuated. In particular, we focused in developing new printing strategies to create active microtubes (outer diameter of <200mm) that can deliver peristaltic contraction and can therefore be used as micropumps. |
Samuele Kronauer
Supervisor: Lucio Pancaldi
Masters Thesis Project, Spring 2018
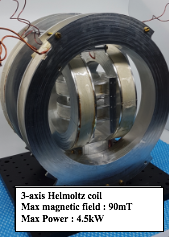 |
In the rising field of magnetically actuated microrobots, a key component to precisely control magnetic micromachines is the Helmoltz coil system. While standard magnets and electromagnets generally create a non-uniform magnetic field (i.e. generates force on magnetic objects), the Helmoltz coil system is designed to ensure a homogeneous magnetic field (i.e only generates torque) inside the workspace. The system is composed of 3 pairs of coils that are controlled by the computer and can generate a magnetic field up to 90mT (MRI ~ 3T). This project aimed at designing and assembling the coils with all the electrical components as well as implementing a software for controlling the magnetic field from the computer. |
Sven Montandon and Benoit Pasquier
Supervisor: Lucio Pancaldi
Semester Project, Fall 2018 and Spring 2019
 |
The goal of the project was to test and implement genetic building blocks to control cellular contractility by light. We tested a variety of genetic systems to control the expression or activity of a target protein by light. After initial tests on single cells, we tested various ways to reliably introduce the optogenetic system into three-dimensional microtissues. The project involved advanced molecular biology, mammalian cell culture, and light microscopy. |
Ece Yildiz and Gregoire Repond
Supervisor: Erik Mailand
Internship and Semester Project, Fall 2016 – Fall 2017
 |
In this project, we developed a robotic surgery platform inspired by state-of-the-art ophthalmic surgery systems. The robot consists of a 6-DOF custom-designed piezoelectric micormanipulator, 3D-printed adapters, and a tiny DC motor driven by a microcontroller for actuating tools such as scissors and forceps. We developed a series of GUIs based on LabView, MATLAB and Micromanager software. The adapter went through multiple optimization iterations for the minimization of vibrations and fine tool control. |
Carla Nannini, Alexandre Bortoli, and Lenny Dupourque
Supervisors: Erik Mailand and Matthias Ruegg
Semester and Masters Thesis Projects, Fall 2016 – Spring 2018
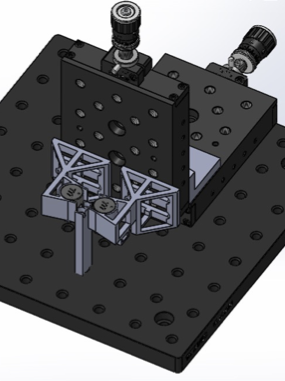
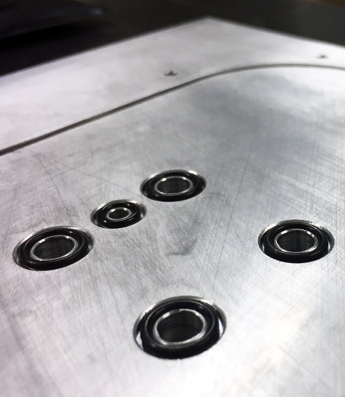
| In this project, we designed and manufactured a device with micropillars. With the aid of this device, we generated holes inside microtissues with well-defined shape and size. |
Mikhail Rudinskiy and Alex Horvath
Supervisor: Erik Mailand
Semester Project, Fall 2016 and Spring 2017