When you access EPFL websites, we may set cookies on your devices and process personal data about you in accordance with our privacy policy. You can block cookies by using your browser settings.
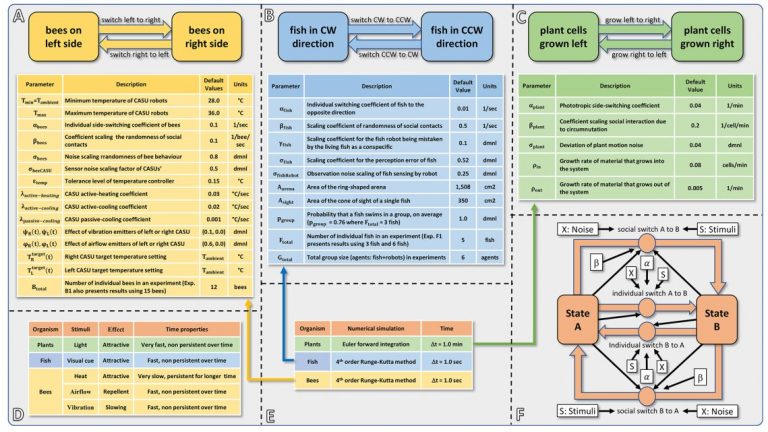
Our research develops and uses robotic devices that interact with animal groups to observe and modulate their behaviour, in order to better understand them, e.g. their collective decision making.
This work has goals in behavioural sciences, collective dynamics and systems modelling; and employs tools and techniques from mobile robotics, microengineering, machine learning, computer vision, and complex systems.
We are developing robotic devices that live inside beehives and continually interact with entire honeybee colonies. The robots modulate the internal hive environment with vibrations and heat; these are used to explore how behaviours can be steered at individual and colony levels (Ilgun et al, 2021). We have recently demonstrated the capacity of our robotic system to interact with an intact winter cluster, comprising thousands of animals (Barmak et al, 2023; see also our press release). This research is part of the FET-EU project HIVEOPOLIS, in which we also contribute to core systems (e.g., Komasilovs et al, 2024) and educational activities. Overall a main aim is to better understand how our long-term live-in robotics (Barmak et al, 2024) can support honeybees in an increasingly hostile environment for these crucial pollinators.
Our previous work studied collective behaviours in honeybee-robot interactions in laboratory conditions (Schmickl et al 2021, Halloy et al 2013, Zahadat et al 2014), investigating how reactive thermal environments influence decision-making.
Fish and robots
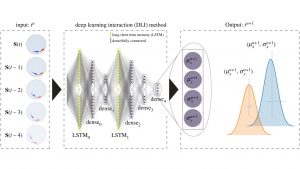
We are developing systems comprising of multiple mobile robots interacting with small groups of fish such as zebrafish (Danio rerio) and rummy-nose tetra (Hemigramus rhodostomus). The robotic agents (Bonnet et al 2017, Bonnet et al 2016, Papaspyros et al 2019, Papaspyros et al, 2023) were controlled via a closed-loop system using computer vision analysis (Bonnet et al 2017), and have been shown to be capable of integrating into groups of fish (Bonnet et al 2018) and modulating collective decisions (Bonnet et al 2018, Chemtob et al 2020). More generally, we work on modelling the dynamics of fish (Escodebo et al 2020), so to design robotic interactions with increased bio-acceptance (Papaspyros et al 2019). Most recently we have shown that deep learning models of fish social interactions are competitive with analytical approaches (Papaspyros et al, 2024) as well as being generalisable.
Interspecies interactions mediated by bio-hybrid robots
Our research within the FET-EU project ASSISIbf included the breakthrough of developing inter-species interactions between honeybees and zebrafish, mediated via robots (Bonnet et al, 2019).
Our press release includes a further summary of this research:
Animals and robots – other research
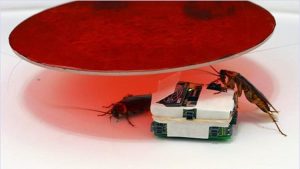
The LEURRE project constructed the first robots that were shown to infiltrate an animal group – being accepted like conspecifics – and, through acting as “agent provocateur”, were able to modulate group decisions from within. (Halloy et al 2007). Here, our robots interacted with cockroaches.
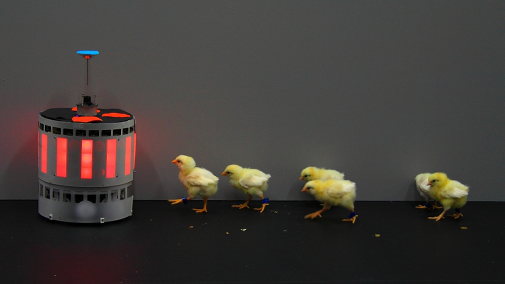
We developed mobile robots that interacted with domestic chickens, (Gribovskiy et al 2018,2008,2012). This system made use of visual and auditory channels for both observation (animals ⇒ robots) and modulation (robots ⇒ animals).
Across all animal-robot interaction studies, the robotic devices must be capable of transmitting cues or signals that are relevant to the animal, of sensing the animal’s response to the presented information, and finally of reacting to it. The design of such animal-interacting robots is highly non-trivial, depending on understanding the animals, modelling, robot design, and embodiment. We developed a general methodology to address these interconnected challenges (Mondada et al 2013).
Related publications
Warning
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform.
The owners of these pages are invited to recreate their publication list from Infoscience.
For any assistance, please consult the Infoscience help or contact support.
2024
A Biohybrid Superorganism – Investigating honeybees’ collective behaviors via interactive robotics
Follow the dummy: measuring the influence of a biomimetic robotic fish-lure on the collective decisions of a zebrafish shoal inside a circular corridor
2018-04-26.Robosoft 2018: The first IEEE-RAS International Conference on Soft Robotics, Livorno, Italy, April 24-28, 2018. p. 504-509. DOI : 10.1109/ROBOSOFT.2018.8405376.
2018-01-01.7th International Conference on Biomimetic and Biohybrid Systems, Living Machines (LM), Paris, FRANCE, Jul 17-20, 2018. p. 73-84. DOI : 10.1007/978-3-319-95972-6_9.
2016.6th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2016), Singapore, June 26-29, 2016. p. 1365-1370. DOI : 10.1109/BIOROB.2016.7523823.
2015.SWARM 2015: The First International Symposium on Swarm Behavior and Bio-Inspired Robotics, Kyoto, Japan, October 28-30, 2015. p. 239-246. DOI : 10.1007/s10015-016-0291-8.
2013.Living Machines, International Conference on Biomimetic and Biohybrid Systems, London, July 29 – August 2013, 2013. p. 441-443. DOI : 10.1007/978-3-642-39802-5_60.
2013.Living Machines, International Conference on Biomimetic and Biohybrid Systems, London, July 29 – August 2013, 2013. p. 384-386. DOI : 10.1007/978-3-642-39802-5_42.
2012.IEEE International Conference on Robotics and Biomimetics (ROBIO 2012), Guangzhou, China, December 11-14, 2012. p. 582-587. DOI : 10.1109/ROBIO.2012.6491029.
2010.The IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems (IROS 2010), Taipei, Taiwan, October 18-22, 2010. p. 4722-4728. DOI : 10.1109/IROS.2010.5649542.