References
This work was done in collaboration with the Laboratory for Multiscale Mechanics Modeling (LAMMM).
To cite this work please use:
1. G. Agarwal, N. Besuchet, B. Audergon, J. Paik, Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices, Scientific Reports, 6, 34224, 2016.
2. P. Moseley, J.M. Florez, H.A. Sonar, G. Agarwal, W. Curtin, J.Paik. Modeling and Design of Soft Pneumatic Actuators, Advanced Engineering Materials, 18(6), 978-988, 2015.
Model Demos
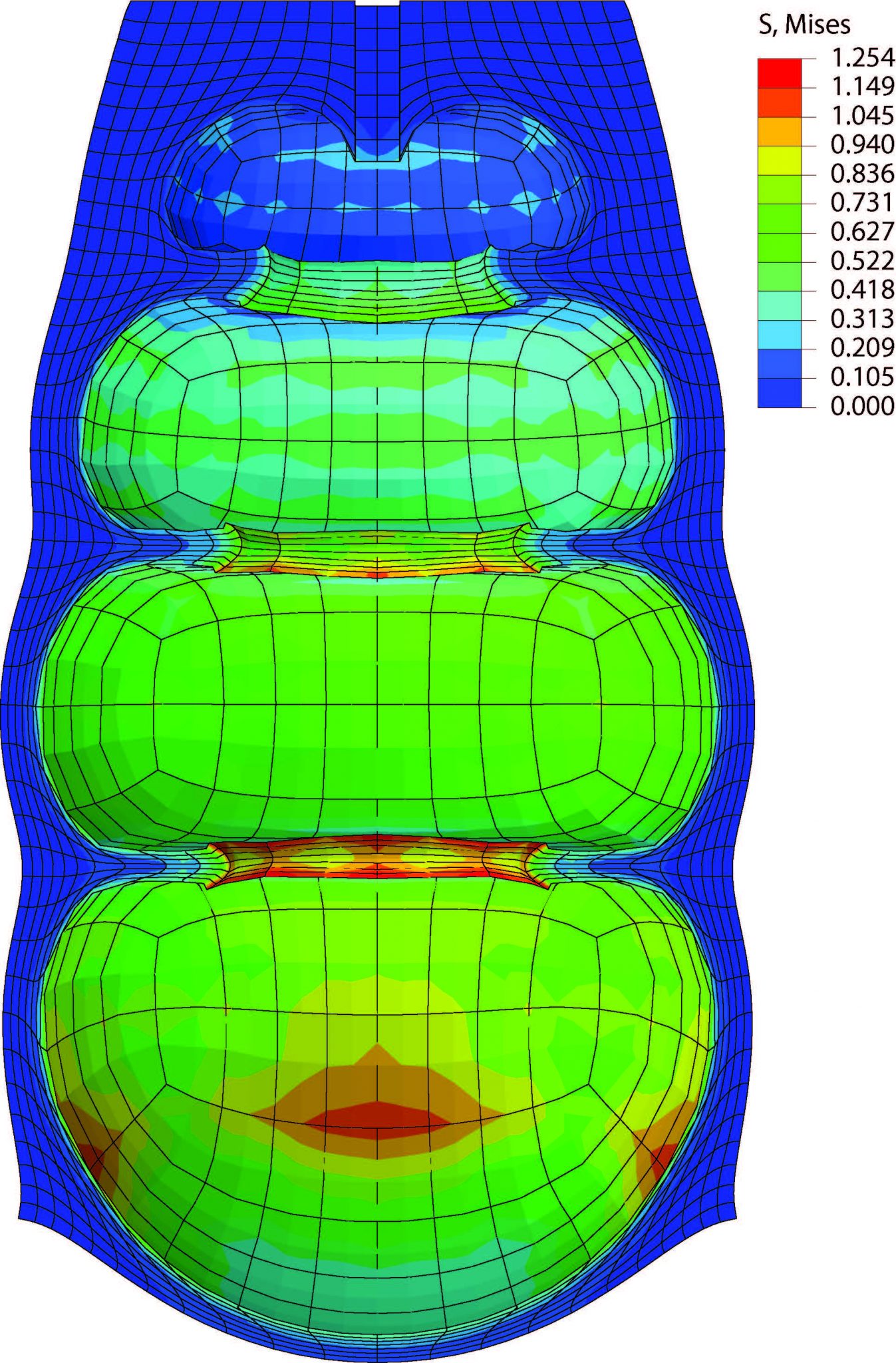
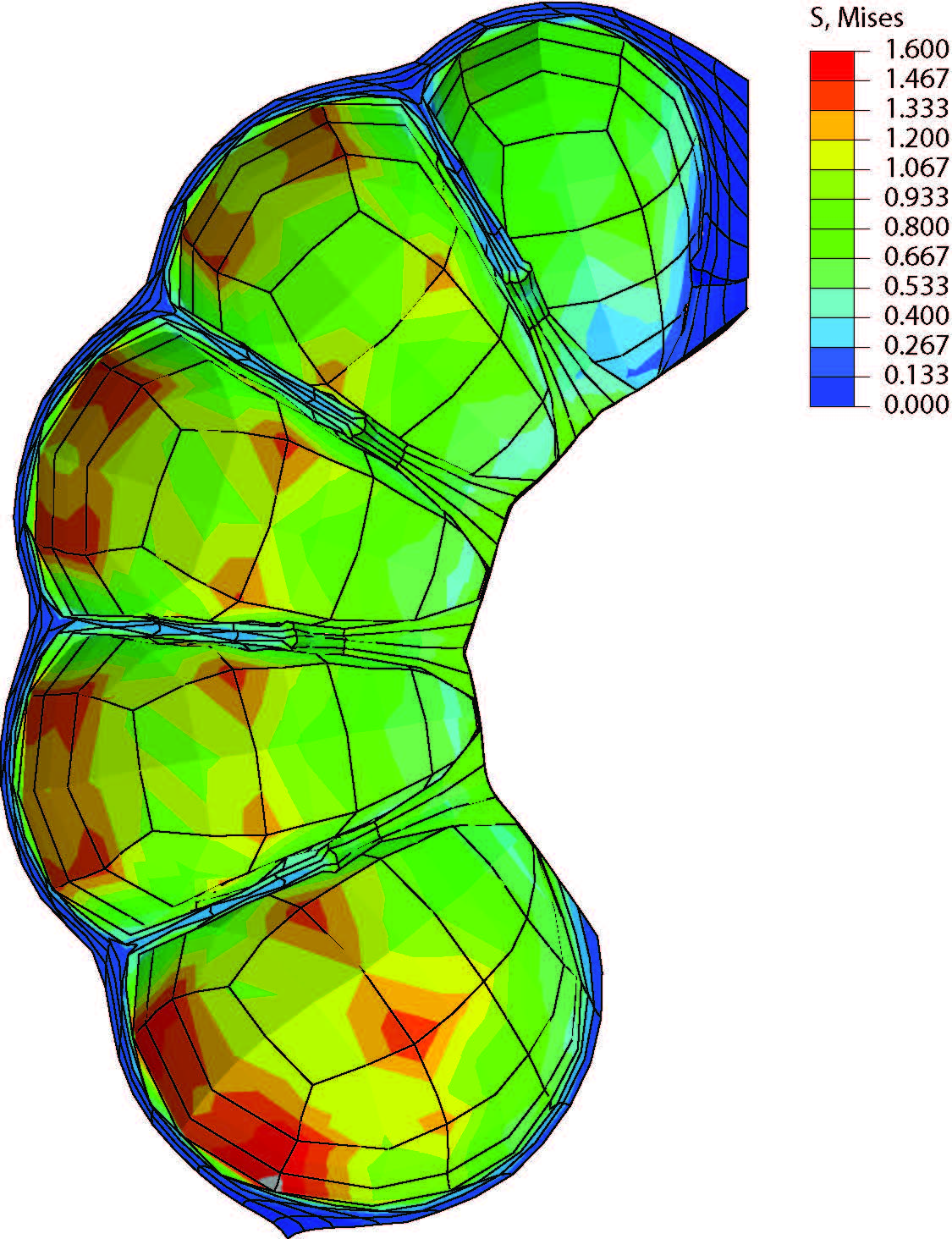
Soft pneumatic actuators are designed to handle large deformations and large mechanical strains. At these high values of strain, the actuator behavior is highly unpredictable. The materials employed to fabricate these actuators exhibit complex hyperelastic, viscoelastic non-linear behavior. Furthermore, fabricating soft pneumatic actuators is time consuming and it is helpful to know the performance characteristics obtainable a priori. Thus, numerical models using the finite element method (FEM) are developed to predict actuator behavior at large deformation values so as to design more efficient actuators and soft robotic components.
A set of four demos is presented in this section to guide the user step-by-step through the process of creating and testing a numerical model for the actuators using the commercial FEM software AbaqusTM . The software interfaces with the python scripts provided in the design tool and enables the automation of the design procedure by providing capabilities for geometry and material variation as input design parameters.
Open-Source Downloads
The complete spa_guided_design_tool for modeling classical multi-chamber actuators is available to the public under the open-source MIT license. Included here is a brief description of the tools and capabilities available. The modules are all written in Python, and some modules interface with the commercial FEM software Abaqus in order to create meshes and run simulations. In order to access the complete set of scripts needed to simulate the actuators, please contact the authors with your name, affiliation and a brief description of your intended application with the aid of the SPA design tool.
spa_run_tests Used to initiate AbaqusTM and run a simulation or series of simulations. It also supports submitting jobs to high-performance compute clusters which use the SLURM queuing system.
spa_create_geom Interfaces with AbaqusTM in order to automate the process of creating a geometry, meshing it, and applying boundary conditions. Given actuator type (linear or bending), desired test (displacement or blocked force), and a set of geometric parameters such as wall thickness, chamber size, and mesh refinement, this tool will output a complete, ready-to-run AbaqusTM input file. This input file can then be run using spa_run_tests or further modified by the user using the AbaqusTM CAE interface.
spa_optimize_geometric_parameters Facilitates SPA design optimization through automated iterative design simulations, as discussed in the case studies presented here. AbaqusTM is required.
spa_calc_hyperelastic_parameters Fits experimental stress-strain data, collected through tests as described in the first Appendix, to a hyperelastic stress-strain constitutive law. AbaqusTM is not required. The following hyperelastic models are available to the user (others may be easily added):
- Arruda–Boyce
- Mooney–Rivlin
- Neo–Hookean
- Ogden 3-parameter
- Ogden 6-parameter
- Ogden 9-parameter
- Polynomial 2-parameter
- Reduced–Polynomial 6-parameter
- Van der Waals
- Yeoh
spa_optimize_hyperelastic_parameters Performs an additional fitting step for the hyperelastic material laws in order to extrapolate missing data or optimize SPA behavior given some actuator testing data, as discussed in the section on material characterization. AbaqusTM is required.
spa_calc_viscoelastic_parameters Fits experimental stress-relaxation data, collected through tests. to a viscoelastic Prony series. AbaqusTM is not required.
spa_plot_results This module provides several useful scripts for visualizing experimental and/or simulation results, used to create the plots in this work. AbaqusTM is not required. The following scripts are included within this module:
create_experimental_plots.py – Plot raw experimental data versus time.
create_hyperelastic_plots.py – Plot stress versus strain for hyperelastic testing data with fits from spa_calc_hyperelastic_parameters.
create_principalcomponentanalysis_plots.py – Plot optimization iteration results from spa_optimize_geometric_parameters in scatterplot form.
create_result_plots.py – Plot displacement or blockedforce versus pressure from FEM simulations and/or experiments.
create_viscoelastic_plots.py – Plot stress versus strain for viscoelastic testing data with fits from
spa_calc_viscoelastic_parameters.