Programmable Matter

Programmable Matter (supported by DARPA and the Wyss Institute) is a new concept for reconfigurable systems based on self-folding sheets of robotic origami. These sheets are constructed from smart materials that embed actuation, computation, communication, and sensing. Embedded actuators are used to self-assemble flat sheets into 3D robots with specified functionality. Creating functional Programmable Matter – with applications ranging from manipulation to locomotion – from quasi-2D parts has its engineering challenges in the areas of computation, fabrication, material selection and design. Novel materials that embed joints, sensing, actuation, computation, and connectors need to be developed to fabricate the robotic origami. As part of the Programmable Matter project, I have developed various versions of self-folding sheets that can achieve multiple shapes. Ultimately, a functional robot requires structural integrity to achieve a wide range of tasks and I aim to elucidate solutions to different lines of research to meet technological and integration challenges for Programmable Matter and demonstrate a functional robotic system. For example, my recent publication features torsional SMA actuators with a uniquely low profile, where I suggest an alternate actuating method that is 40% more power efficient and 20% faster than the conventional method. This Programmable Matter work appeared in the NY MoMA’s “Talk to Me” exhibition catalog.
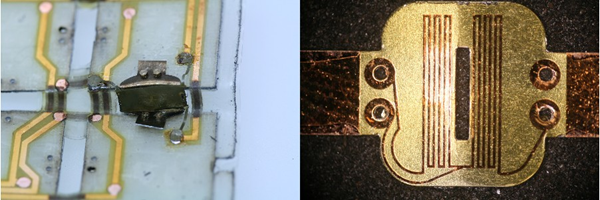
This is a low-profile SMA actuator (measures 7mm tall and 6mm wide) that actuates in two opposite directions. This is enabled by an external heater that can focus its heating on the desired area for actuation. A novel pattern for annealing minimized the gap between the actuating edges and ensured the actuator quality consistency.
3-DoF Motorized Laparoscopic Surgical Instrument for Minimally Invasive Surgery
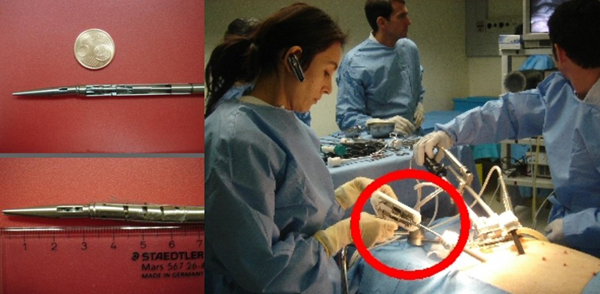
Motorized laparoscopic surgical tool (supported by EndoControl Co.) is a handheld motorized tool that enables surgeons to suture in addition to the functionality offered by other conventional tools. It is extremely difficult to suture with laparoscopic tools unless a more sophisticated, teleoperated system such as daVinci is used (Intuitive Surgical Inc.). However, most surgeons prefer handheld tools due to the proximity to the patient and minimal additional training and preparation time. As a postdoc at ISIR, I was involved with a project with EndoControl Co. as a principal engineer for developing a new 3 DoF surgical instrument to give laparoscopic surgeons more dexterity in their procedures. I was involved from the design conception where I participated in numerous prostate and respiratory surgeries. I produced two prototypes that were animal in vivo tested and EU patented and they are now filed with WIOP for an international patent.
Orthèse: Exoskeleton for Upperarm Rehabilitations

Orthèse is an upper-limb rehabilitation robot. Patients with upper-arm disabilities most often require gradual but consistent and extensive physical therapy. The exercises are often simple but repetitive and require full assistance from a physical therapist. The cable-driven exoskeleton can replace or assist a therapist on performing these therapy sessions. The challenge of refining the developed Orthèse was to create an interface with a patient’s arm in order to minimize the force redundancy on the points of attachment and to receive a more accurate force reading. The work Orthèse is directly relevant to the research efforts in “soft orthotic” project which my lab is participating in Harvard. This project aims to create a similar orthotic device, but using only soft materials for sensing and actuation. Many of the lessons learned from Programmable Matter are directly applicable to this project.
Humanoid Applicable Anthropomorphic Robotic Arm and Hand
Anthropomorphic robotic arm (supported by Samsung Electronics) is a modular robot applicable for a life-sized humanoid. Its design is true to an adult male’s anthropometrics such as length, weight, payload, range of motion, and speed. Human muscles have an extremely high force density; therefore, in designing a biomimetic robot, the engineering challenge lies in minimizing weight without sacrificing torque, speed, range of motion, and degrees of freedom (DoF). Using 7 DC motors for the arm and 8 servomotors for the hand, the design focus of the robot is on reducing the weight without losing the minimum DoFs in the joints. The robot development was a group effort and my contribution was on the gear trains, the forearm, and cable-driven finger joints. In terms of software, the humanoid arm adapts an algorithm to sense and interpret the incoming external force and escapes toward a safe direction. In terms of hardware, it is designed to have minimum impact inertia and maintain minimum backlash in the gears. Since the prototype completion, Samsung Electronics’ Robotic Research Department has retrieved the arm as a part of their research efforts in autonomous personal robots.
More videos are available in the link below
MUSA: The Kendo Robot
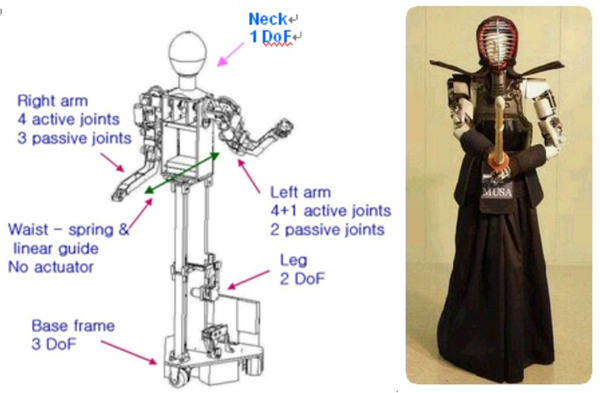
The contemporary humanoids are often physically required to have redundant DoFs for completing motion specific / anthropomorphic tasks. Conventional motion teaching methods are not directly or intuitively applicable to redundant link structures.
With MUSA: the Kendo training robot, we present a proficient, cost-effective, and intuitive method for motion teaching. This new method utilizes current sensors to determine incoming torques and uses this reading to react with certain Kendo moves.
We also developed new software to apply this method to a humanoid with intuitive GUI and efficient robot motion trajectory algorithms.
More videos are available in the links below
- How a clothing mannequine would normally be set up
- How MUSA’s motions are taught using the propsed motion teaching method
The 3-DoF Anthropomorphic Ocularmotor Simulator
The simulator was developed for:
- An accurate simulation of the human eyeball in 3-DOF motion
- A superior 3-D image data acquisition
- An enhancement in image data processing
- The implantation of tracking and orienting devices with a wider range of motion than 2-DoF devices
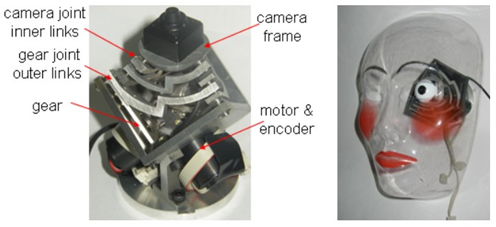
The anthropomorphic oculomotor with a 3-DoF spherical parallel link developed here is compact while producing enough torque to simulate the human eye behavior. It has an ideal design for humanoid applications. Although the interest in developing biomechanical systems of the human body including the eyes has been great, it has been difficult to successfully simulate the moving architecture of the human oculomotor system without increasing the overall volume and keeping the 3-DoF of the eye movement.
The human eye, as it has three rotational axes, is best simulated with a device with 3-DoF, which provides a faster, wider range of motion (with torque axis), and more accurate image processing than 2-DOF models.
The anthropomorphic oculomotor is designed to mimic the actual biomechanics and kinematics of the eye: the center of rotation remains constant and is placed 13.5mm behind the lens: it is small enough to fit into a life-sized humanoid head (104 X 72.5 X 72.5mm): and yet rotates and moves with proficient torque and speed to bear great similitude to the human eye. The human eye, upon stereotyped neural commands, achieves precise positioning and stable tracking by rotational movements with more than 500 deg/s in 3 DoF: horizontal, vertical, and torsional rotational axes. This simulator is also capable of moving at such a rate as well.
More videos are available in the links below
Automated Belt Punch
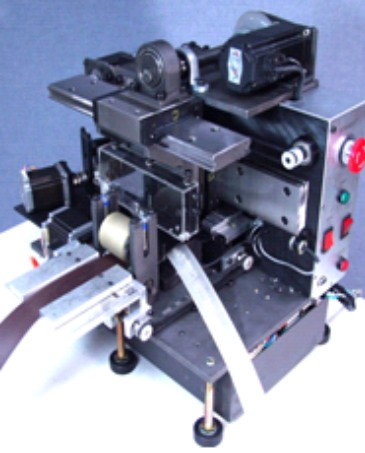
The automated belt punch project was funded by the State Gov. and The Small & Midsized Business Bureau. The conventional belt punching machines for producing straight and / or repeated designs are already in use in factories; however, current fashion belts often require non-straight lines or holes that need to be punched with multi-tool bits.
We developed a desktop-sized automated belt punch machine that uses 3 linear guides, a cam-driven punch, and 3 interchangeable tools, completed with an automated belt feeder.
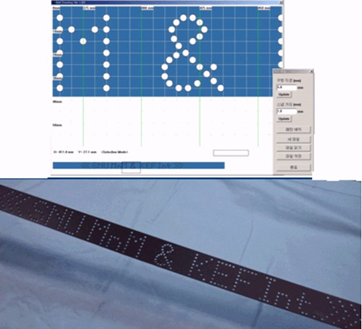
The figure above shows the developed software for processing belt designs (readymade designs for modifications or creating new belt designs). Using this software, the user can plot/upload designs on the screen, and a data table is produced to be sent to the punch which has an embedded controller. PC is only used for designing and modifying the design data. Once the data is transferred, the pattern is punched on the belt as shown in the bottom picture. The punched design has a total of 234 holes using a single tool (Average 0.85 sec/hole).
Mini-generator (VR-type)
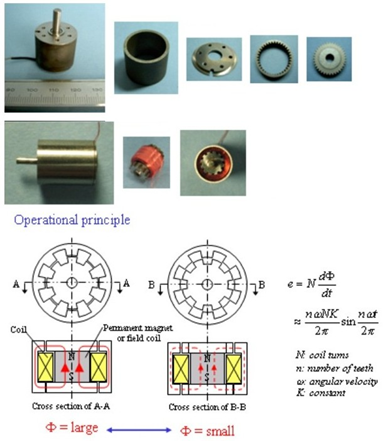
In this research, we presented a new design of a variable reluctance type generator; promising test results of the developed VR generator both in its designs and sizes; and application in micro-power pack as it can be used both as a motor and a generator.
Advantages of the new generator:
- High power due to high-frequency operation
- Simple structure using toroidal coil
- Capability of low-speed operation
4-Legged Surveillance Dog
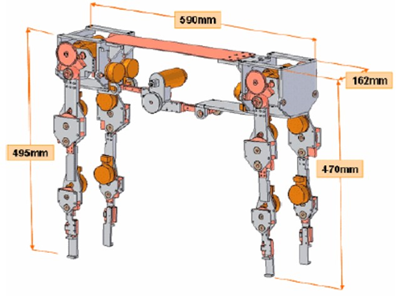
In this project, we designed and developed a quadruped surveillance robot equipped with sufficient actuation capabilities to transition from a prone position to standing. The system incorporates 4 degrees of freedom (DoF) per leg and an additional DoF at the waist, resulting in a total of 17 DoFs for enhanced mobility and versatility.
Automated Vacuuming Machine

For a practical automated home appliance application, an automated vacuum cleaning robot with an auxiliary wheel mechanism was designed. The auxiliary wheels collect data of traveled distance and decrease the measurement error for locating itself during navigation.